Co jest punktem odniesienia w definicji fizyki. Ruch mechaniczny. System referencyjny. Przydatne wideo: inercyjne i nieinercyjne układy odniesienia
Ramy Odniesienia- jest to zbiór ciał nieruchomych względem siebie (ciało odniesienia), w stosunku do których rozpatrywany jest ruch (w skojarzonym z nimi układzie współrzędnych) oraz zegarów odliczających czas (układ odniesienia czasu), w odniesieniu do w którym uwzględniany jest ruch dowolnych ciał.
Matematycznie ruch ciała (lub punktu materialnego) względem wybranego układu odniesienia opisuje się równaniami, które określają, jak zmienia się on w czasie T współrzędne określające położenie ciała (punktu) w tym układzie odniesienia. Równania te nazywane są równaniami ruchu. Na przykład we współrzędnych kartezjańskich x, y, z ruch punktu jest określony przez równania x = fa 1 (t) (\ Displaystyle x = f_ (1) (t)), y = fa 2 (t) (\ displaystyle y = f_ (2) (t)), z = fa 3 (t) (\ displaystyle z = f_ (3) (t)).
We współczesnej fizyce każdy ruch uważany jest za względny, a ruch ciała należy rozpatrywać tylko w odniesieniu do innego ciała (ciała odniesienia) lub układu ciał. Nie da się np. wskazać jak Księżyc w ogóle się porusza, można jedynie określić jego ruch np. względem Ziemi, Słońca, gwiazd itp.
Inne definicje
Z drugiej strony dotychczas uważano, że istnieje pewien „fundamentalny” układ odniesienia, którego prostota zapisu praw natury odróżnia go od wszystkich innych systemów. Tym samym Newton uważał przestrzeń absolutną za wyróżniony układ odniesienia, a fizycy XIX wieku uważali, że układ, względem którego spoczywa eter elektrodynamiki Maxwella, jest uprzywilejowany i dlatego nazwano go absolutnym układem odniesienia (AFR). Wreszcie założenia o istnieniu uprzywilejowanego układu odniesienia zostały odrzucone przez teorię względności. We współczesnych koncepcjach nie ma bowiem absolutnego układu odniesienia
Z zajęć fizyki w klasie siódmej pamiętamy, że ruch mechaniczny ciała to jego ruch w czasie względem innych ciał. Na podstawie takich informacji możemy założyć niezbędny zestaw narzędzi do obliczania ruchu ciała.
Po pierwsze potrzebujemy czegoś, na podstawie czego będziemy dokonywać obliczeń. Następnie będziemy musieli uzgodnić, w jaki sposób określimy pozycję ciała względem tego „czegoś”. I na koniec będziesz musiał jakoś zarejestrować czas. Aby zatem obliczyć, gdzie w danym momencie znajdzie się ciało, potrzebny jest układ odniesienia.
Układ odniesienia w fizyce
Układ odniesienia w fizyce to połączenie ciała odniesienia, układu współrzędnych powiązanego z ciałem odniesienia oraz zegara lub innego urządzenia do pomiaru czasu. Należy zawsze pamiętać, że każdy system odniesienia jest warunkowy i względny. Zawsze można przyjąć inny układ odniesienia, w stosunku do którego każdy ruch będzie miał zupełnie inną charakterystykę.
Teoria względności jest ogólnie ważnym aspektem, który należy wziąć pod uwagę w prawie wszystkich obliczeniach w fizyce. Na przykład w wielu przypadkach nie jesteśmy w stanie w żadnym momencie określić dokładnych współrzędnych poruszającego się ciała.
W szczególności nie możemy umieszczać obserwatorów z zegarkami co sto metrów wzdłuż torów kolejowych z Moskwy do Władywostoku. W tym przypadku obliczamy prędkość i położenie ciała w przybliżeniu w pewnym okresie czasu.
Dokładność do jednego metra nie jest dla nas istotna przy wyznaczaniu lokalizacji pociągu na trasie liczącej kilkaset czy tysiące kilometrów. Istnieją na to przybliżenia w fizyce. Jednym z takich przybliżeń jest koncepcja „punktu materialnego”.
Punkt materialny w fizyce
W fizyce punkt materialny oznacza ciało w przypadkach, gdy można pominąć jego rozmiar i kształt. W tym przypadku zakłada się, że punkt materialny ma masę pierwotnego ciała.
Przykładowo przy obliczaniu czasu lotu samolotu z Nowosybirska do Nowopołocka wielkość i kształt samolotu nie są dla nas istotne. Wystarczy wiedzieć, jaką prędkość rozwija i jaka jest odległość między miastami. W przypadku, gdy musimy obliczyć opór powietrza na określonej wysokości i przy określonej prędkości, z pewnością nie obejdziemy się bez dokładnej znajomości kształtu i wymiarów tego samego samolotu.
Prawie każde ciało można uznać za punkt materialny albo wtedy, gdy odległość, jaką przebyło ciało, jest duża w porównaniu z jego rozmiarami, albo gdy wszystkie punkty ciała poruszają się równomiernie. Przykładowo, samochód jadący kilka metrów od sklepu do skrzyżowania jest w miarę porównywalny z tą odległością. Ale nawet w takiej sytuacji można to uznać za istotny punkt, ponieważ wszystkie części samochodu poruszały się równomiernie i w równej odległości.
Ale w przypadku, gdy musimy umieścić ten sam samochód w garażu, nie można już tego uważać za istotny punkt. Będziesz musiał wziąć pod uwagę jego rozmiar i kształt. To także przykłady, kiedy konieczne jest uwzględnienie teorii względności, czyli w odniesieniu do tego, co robimy, konkretnych obliczeń.
Wykład 1. Elementy kinematyki.
Punkt materialny
Punkt materialny - przedmiot o znikomych rozmiarach, który ma masę.
Wprowadzono pojęcie „punktu materialnego” w celu opisu (za pomocą wzorów matematycznych) mechanicznego ruchu ciał. Dzieje się tak, ponieważ łatwiej jest opisać ruch punktu niż rzeczywistego ciała, którego cząstki mogą również poruszać się z różnymi prędkościami (na przykład podczas obrotu ciała lub deformacji).
Jeżeli rzeczywiste ciało zastąpimy punktem materialnym, to do tego punktu przypisuje się masę tego ciała, pomijając jednak jego wymiary, a jednocześnie różnicę w charakterystyce ruchu jego punktów (prędkości, przyspieszenia, itp.), jeśli takie istnieją, jest pomijane. W jakich przypadkach można to zrobić?
Prawie każde ciało można uznać za punkt materialny, jeśli odległości pokonywane przez punkty ciała są bardzo duże w porównaniu z jego rozmiarami.
Na przykład Ziemię i inne planety uważa się za punkty materialne podczas badania ich ruchu wokół Słońca. W tym przypadku różnice w ruchu różnych punktów dowolnej planety, spowodowane jej codzienną rotacją, nie wpływają na wielkości opisujące roczny ruch.
Jeśli więc w ruchu badanego ciała pominąć jego obrót wokół osi, to ciało to można przedstawić jako punkt materialny.
Jednak przy rozwiązywaniu problemów związanych z codzienną rotacją planet (na przykład przy określaniu wschodu słońca w różnych miejscach na powierzchni globu) nie ma sensu uważać planety za punkt materialny, ponieważ wynik problemu zależy od wielkości tej planety i prędkości ruchu punktów na jej powierzchni.
^ Uzasadnione jest uznanie samolotu za punkt materialny, jeśli konieczne jest na przykład określenie średniej prędkości jego ruchu w drodze z Moskwy do Nowosybirska. Ale przy obliczaniu siły oporu powietrza działającej na lecący samolot nie można tego uznać za punkt materialny, ponieważ siła oporu zależy od wielkości i kształtu samolotu.
Jeśli ciało porusza się translacyjnie, nawet jeśli jego wymiary są porównywalne z przebytą drogą, to ciało to można uznać za punkt materialny (ponieważ wszystkie punkty ciała poruszają się w ten sam sposób).
Podsumowując, możemy powiedzieć: ciało, którego wymiary można pominąć w warunkach rozpatrywanego problemu, można uznać za punkt materialny.
Absolutnie sztywny korpus - model fizyczny (np. punkt materialny).
Absolutnie sztywny korpus- układ mechaniczny, który ma tylko postępowe i obrotowe stopnie swobody. „Twardość” oznacza, że ciała nie można odkształcić, to znaczy, że żadna inna energia nie może zostać przekazana ciału z wyjątkiem energia kinetyczna ruch translacyjny lub obrotowy.
W 3D całkowicie sztywne ciało ma 6 stopni swobody.
Dla absolutnie sztywnego korpusu, kompletny energia kinetyczna można zapisać jako sumę energii kinetycznej ruchu postępowego i obrotowego:
Masa ciała
Prędkość środka masy ciała
Moment bezwładności ciała
Prędkość kątowa ciała.
Układ odniesienia w fizyce
Układ odniesienia w fizyce to połączenie ciała odniesienia, układu współrzędnych powiązanego z ciałem odniesienia oraz zegara lub innego urządzenia do pomiaru czasu. Należy zawsze pamiętać, że każdy system odniesienia jest warunkowy i względny. Zawsze można przyjąć inny układ odniesienia, w stosunku do którego każdy ruch będzie miał zupełnie inną charakterystykę.
Teoria względności jest ogólnie ważnym aspektem, który należy wziąć pod uwagę w prawie wszystkich obliczeniach w fizyce. Na przykład w wielu przypadkach nie jesteśmy w stanie w żadnym momencie określić dokładnych współrzędnych poruszającego się ciała.
W szczególności nie możemy umieszczać obserwatorów z zegarkami co sto metrów wzdłuż torów kolejowych z Moskwy do Władywostoku. W tym przypadku obliczamy prędkość i położenie ciała w przybliżeniu w pewnym okresie czasu.
Dokładność do jednego metra nie jest dla nas istotna przy wyznaczaniu lokalizacji pociągu na trasie liczącej kilkaset czy tysiące kilometrów. Istnieją na to przybliżenia w fizyce. Jednym z takich przybliżeń jest koncepcja „punktu materialnego”.
Trajektoria, ścieżka, ruch
złamana krzywa - to linia zwany trajektoria. Ponieważ trajektoria jest linią, nie ma ona kierunku ani wartości liczbowej – jest to tylko linia.
Trajektoria może być znana jeszcze przed rozpoczęciem ruchu. Trajektoria wyprawy, sztuczne satelity Ziemi, bezpieczna trasa itp. są obliczane z wyprzedzeniem.
W zależności od trajektorii ruchy mogą być prostoliniowe (rakieta podczas startu, sopel lodu z dachu) i zakrzywione (piłka tenisowa, piłka nożna, po uderzeniu).
Trajektoria tego samego ruchu jest różna w różnych układach odniesienia. Na przykład dla pasażera pociągu poruszającego się ruchem jednostajnym kula wpadająca do wagonu porusza się pionowo w górę, a dla osoby stojącej na peronie ta sama kula porusza się po trajektorii parabolicznej.
Następnie możesz zadać pytanie: Jaka jest długość trajektorii i jak ją zmierzyć?
Studenci oferują swoje wersje.
Ogólnie rzecz biorąc, długość trajektorii wynosi ścieżka.
Ścieżka nie ma kierunku, tj. ilość skalarna.
Jeśli odcinki trajektorii są prostoliniowe, wówczas ścieżka jest równa sumie długości odcinków.
Jeśli sekcje są zakrzywione, wówczas zmianę współrzędnych ciała opisuje się za pomocą takiej koncepcji jak ruch.
Poruszający– wielkość wektorowa, tj. Oprócz wartości liczbowej ma również kierunek.
Jest on oznaczony na rysunkach jako skierowany odcinek łączący początkowe i końcowe położenie ciała w przestrzeni.
Moduł przemieszczenia i droga mogą mieć zbieżną wartość tylko wtedy, gdy ciało porusza się po tej samej linii prostej w tym samym kierunku.
Znając początkowe położenie wektora przemieszczenia ciała, można określić, gdzie w dowolnym momencie znajduje się ciało i w jakim kierunku się porusza.
Ruchy translacyjne i obrotowe
Progresywny to ruch ciała sztywnego, podczas którego dowolna linia prosta narysowana w tym ciele porusza się, pozostając równoległa do swojego kierunku początkowego. Ruchu translacyjnego nie należy mylić z ruchem prostoliniowym. Kiedy ciało porusza się do przodu, trajektorie jego punktów mogą być dowolnymi zakrzywionymi liniami.
Ruch obrotowy ciała sztywnego wokół ustalonej osi to taki ruch, w którym dowolne dwa punkty należące do ciała (lub niezmiennie z nim skojarzone) pozostają w ruchu przez cały czas trwania ruchu
Prędkość i przyspieszenie
Prędkość- jest to stosunek przebytej drogi do czasu przebycia tej drogi. Prędkość jest taka sama jest sumą prędkości początkowej i przyspieszenia pomnożonej przez czas. Prędkość jest iloczynem prędkości kątowej i promienia okręgu.
v=S/t v=v 0 +a*t v=ωR
Przyspieszenie ciała w ruchu jednostajnie przyspieszonym- wartość równa stosunkowi zmiany prędkości do okresu czasu, w którym ta zmiana nastąpiła.
Przyspieszenie styczne (styczne).– jest to składowa wektora przyspieszenia skierowana wzdłuż stycznej do trajektorii w danym punkcie trajektorii ruchu. Przyspieszenie styczne charakteryzuje zmianę prędkości modulo podczas ruchu krzywoliniowego.
 Ryż. 1.10. Przyspieszenie styczne.
Ryż. 1.10. Przyspieszenie styczne.
Kierunek stycznego wektora przyspieszenia τ (patrz rys. 1.10) pokrywa się z kierunkiem prędkości liniowej lub jest do niego przeciwny. Oznacza to, że styczny wektor przyspieszenia leży na tej samej osi co styczny okręg, który jest trajektorią ciała.
Normalne przyspieszenie jest składową wektora przyspieszenia skierowaną wzdłuż normalnej do trajektorii ruchu w danym punkcie trajektorii ciała. Oznacza to, że normalny wektor przyspieszenia jest prostopadły do liniowej prędkości ruchu (patrz ryc. 1.10). Przyspieszenie normalne charakteryzuje zmianę prędkości w kierunku i jest oznaczone literą n. Wektor przyspieszenia normalnego jest skierowany wzdłuż promienia krzywizny trajektorii.
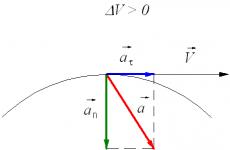
Pełne przyspieszenie podczas ruchu krzywoliniowego składa się z przyspieszeń stycznych i normalnych wzdłuż reguła dodawania wektorów i jest wyznaczany ze wzoru:

(zgodnie z twierdzeniem Pitagorasa dla prostokąta).
Wyznaczany jest także kierunek całkowitego przyspieszenia reguła dodawania wektorów:
Prędkość kątowa jest wielkością wektorową równą pierwszej pochodnej kąta obrotu ciała po czasie: ![]()

w=ωR
Przyspieszenie kątowe jest wielkością wektorową równą pierwszej pochodnej prędkości kątowej po czasie:

Ryc.3
Kiedy ciało obraca się wokół stałej osi, wektor przyspieszenia kątowego ε skierowany wzdłuż osi obrotu w kierunku wektora elementarnego przyrostu prędkości kątowej. Podczas ruchu przyspieszonego wektor ε współkierunkowy do wektora ω (Rys. 3), przy zwalnianiu jest do niego przeciwny (Rys. 4).

Ryc.4
Składowa styczna przyspieszenia a τ =dv/dt, v = ωR i Normalna składowa przyspieszenia Oznacza to, że zależność pomiędzy wielkościami liniowymi (długość drogi s, którą przechodzi punkt na łuku kołowym o promieniu R, prędkość liniowa v, przyspieszenie styczne a τ, przyspieszenie normalne a n) i kątowymi (kąt obrotu φ, prędkość kątowa ω, przyspieszenie kątowe ε) wyraża się następującymi wzorami:
s = R φ , v = R ω , A τ = R?, a N = ω 2 R. W przypadku ruchu jednostajnego punktu po okręgu (ω=const)
ω = ω 0 ± Δt, φ = ω 0 t ± Δt 2 /2, gdzie ω 0 jest początkową prędkością kątową.
Rodzaje ruchów
Jednolity ruch– jest to ruch ze stałą prędkością, czyli gdy prędkość się nie zmienia (v = const) i nie następuje przyspieszanie lub zwalnianie (a = 0).
Jednolity ruch liniowy- jest to ruch, podczas którego ciało wykonuje równe ruchy w równych odstępach czasu. Przykładowo, jeśli podzielimy pewien przedział czasu na jednosekundowe odstępy, to przy ruchu jednostajnym ciało w każdym z tych odstępów czasu przebędzie tę samą odległość.
Prędkość jednostajnego ruchu prostoliniowego nie zależy od czasu i w każdym punkcie trajektorii jest skierowana w taki sam sposób, jak ruch ciała. Oznacza to, że wektor przemieszczenia pokrywa się w kierunku z wektorem prędkości. W tym przypadku prędkość średnia w dowolnym okresie czasu jest równa prędkości chwilowej:
Prędkość jednolitego ruchu prostoliniowego jest wielkością wektora fizycznego równą stosunkowi ruchu ciała w dowolnym okresie czasu do wartości tego przedziału t:
Zatem prędkość jednostajnego ruchu prostoliniowego pokazuje, ile ruchu wykonuje punkt materialny w jednostce czasu.
Wykład 2. Dynamika punktu materialnego.
« Fizyka – klasa 10”
W zależności od charakteru rozwiązywanych problemów mechanikę dzieli się na kinematyka I dynamika.
Kinematyka opisuje ruch ciał bez identyfikowania przyczyn powodujących ten ruch.
Pierwszą rzeczą, która rzuca się w oczy podczas obserwacji otaczającego nas świata, jest jego zmienność. Świat nie jest zamrożony, statyczny. Zmiany w nim są bardzo różnorodne. Jeśli jednak zapytamy Cię, jakie zmiany zauważasz najczęściej, odpowiedź prawdopodobnie będzie jasna: zmienia się położenie obiektów(lub ciała, jak mówią fizycy) względem podłoża i względem siebie w czasie.
Niezależnie od tego, czy pies biegnie, czy samochód ściga się, z nimi zachodzi ten sam proces: ich pozycja względem podłoża i względem ciebie zmienia się w czasie. Poruszają się. Sprężyna ściska się, deska, na której siedzisz, wygina się i zmienia się położenie różnych części ciała względem siebie.
Nazywa się zmianą położenia ciała lub części ciała w przestrzeni względem innych ciał w czasie ruch mechaniczny.
Definicja ruchu mechanicznego wygląda na prostą, lecz ta prostota jest zwodnicza. Przeczytaj definicję jeszcze raz i zastanów się, czy wszystkie słowa są dla Ciebie jasne: przestrzeń, czas, w stosunku do innych ciał. Najprawdopodobniej te słowa wymagają wyjaśnienia.
Przestrzeń i czas.
Przestrzeń i czas to pojęcia najbardziej ogólne i... najmniej jasne w fizyce.
Nie mamy wyczerpującej informacji o przestrzeni i czasie. Nie sposób jednak przedstawić wyników, jakie uzyskano dzisiaj na samym początku studiowania fizyki.
Zwykle wystarczy, że potrafimy zmierzyć odległość pomiędzy dwoma punktami w przestrzeni za pomocą linijki i odstępy czasu za pomocą zegara. Linijka i zegar to najważniejsze przyrządy pomiarowe w mechanice i życiu codziennym. Przy badaniu wielu zjawisk we wszystkich obszarach nauki należy uwzględniać odległości i odstępy czasowe.
„...Jeśli chodzi o inne ciała.”
Jeśli ta część definicji ruchu mechanicznego umknęła Twojej uwadze, ryzykujesz, że nie zrozumiesz najważniejszej rzeczy. Na przykład w przedziale wagonu na stole leży jabłko. Podczas odjazdu pociągu dwóch obserwatorów (pasażer i osoba im towarzysząca) proszenych jest o odpowiedź na pytanie: czy jabłko się porusza, czy nie?
Każdy obserwator ocenia położenie jabłka względem siebie. Pasażer widzi, że jabłko znajduje się w odległości 1 m od niego i odległość ta nie zmienia się w czasie. Osoba odprowadzająca Cię na peron widzi, jak z biegiem czasu zwiększa się odległość dzieląca ją od jabłka.
Pasażer odpowiada, że jabłko nie ulega mechanicznemu ruchowi – jest nieruchome; steward mówi, że jabłko się porusza.
Prawo względności ruchu:
Charakter ruchu ciała zależy od tego, w odniesieniu do jakich ciał rozważamy ten ruch.
Zacznijmy studiować ruch mechaniczny. Obranie właściwej ścieżki zajęło ludzkości około dwóch tysięcy lat, co zakończyło się odkryciem praw ruchu mechanicznego.
Próby starożytnych filozofów wyjaśnienia przyczyn ruchu, w tym mechanicznych, były owocem czystej fantazji. Tak jak, rozumowali, zmęczony podróżnik przyspiesza kroki, zbliżając się do domu, tak spadający kamień zaczyna poruszać się coraz szybciej, zbliżając się do matki ziemi. Ruchy organizmów żywych, takich jak koty, wydawały się w tamtych czasach znacznie prostsze i bardziej zrozumiałe niż upadek kamienia. Nie zabrakło jednak błyskotliwych spostrzeżeń. I tak grecki filozof Anaksagoras powiedział, że Księżyc, gdyby się nie poruszał, spadłby na Ziemię jak kamień spadający z procy.
Jednak prawdziwy rozwój nauki o ruchu mechanicznym rozpoczął się od prac wielkiego włoskiego fizyka G. Galilei.
Kinematyka to dziedzina mechaniki badająca sposoby opisu ruchów i zależności między wielkościami charakteryzującymi te ruchy.
Opisanie ruchu ciała oznacza wskazanie sposobu określenia jego położenia w przestrzeni w dowolnym momencie.
Już na pierwszy rzut oka zadanie opisu wydaje się bardzo trudne. Rzeczywiście, spójrz na wirujące chmury i kołyszące się liście na gałęzi drzewa. Wyobraź sobie złożony ruch tłoków samochodu pędzącego autostradą. Jak zacząć opisywać ruch?
Najprostszą rzeczą (a w fizyce zawsze przechodzimy od prostych do złożonych) jest nauczenie się opisywania ruchu punktu. Przez punkt można rozumieć np. mały znak umieszczony na poruszającym się przedmiocie – piłce nożnej, kole traktora itp. Jeśli wiemy, w jaki sposób następuje ruch każdego takiego punktu (każdego bardzo małego fragmentu) ciała, wtedy będziemy wiedzieć jak porusza się całe ciało.
Jeśli jednak powiesz, że przejechałeś na nartach 10 km, nikt nie będzie sprecyzował, która część Twojego ciała pokonała dystans 10 km, choć w żadnym wypadku nie jesteś to punkt. W tym wypadku nie ma to większego znaczenia.
Wprowadźmy pojęcie punktu materialnego – pierwszy model fizyczny ciał rzeczywistych.
Punkt materialny- ciało, którego wielkość i kształt można pominąć w warunkach rozpatrywanego problemu.
System referencyjny.
Jak już wiemy, ruch dowolnego ciała jest ruchem względnym. Oznacza to, że ruch danego ciała może różnić się od ruchu innych ciał. Badając ruch interesującego nas ciała, musimy wskazać, w odniesieniu do jakiego ciała ten ruch jest rozpatrywany.
Ciało, względem którego rozważany jest ruch, nazywa się punkt odniesienia.
Aby obliczyć położenie punktu (ciała) względem wybranego obiektu referencyjnego w zależności od czasu, należy nie tylko powiązać z nim układ współrzędnych, ale także umieć zmierzyć czas. Czas mierzy się za pomocą zegara. Nowoczesne zegarki to złożone urządzenia. Umożliwiają pomiar czasu w sekundach z dokładnością do trzynastego miejsca po przecinku. Naturalnie żaden zegarek mechaniczny nie jest w stanie zapewnić takiej dokładności. Zatem jeden z najdokładniejszych zegarów mechanicznych w kraju na Wieży Spasskiej na Kremlu jest dziesięć tysięcy razy mniej dokładny niż państwowy standard czasu. Jeśli zegar referencyjny nie zostanie wyregulowany, przesunie się o jedną sekundę lub spóźni się o trzysta tysięcy lat. Oczywiste jest, że w życiu codziennym nie ma potrzeby odmierzania czasu z bardzo dużą dokładnością. Jednak w przypadku badań fizycznych, astronautyki, geodezji, radioastronomii i kontroli transportu powietrznego wysoka dokładność pomiaru czasu jest po prostu konieczna. Dokładność, z jaką możemy obliczyć położenie ciała w dowolnym momencie, zależy od dokładności pomiaru czasu.
Nazywa się zbiór obiektu odniesienia, powiązanego z nim układu współrzędnych i zegara układu odniesienia.

Rysunek przedstawia układ odniesienia wybrany do rozważenia lotu rzuconej piłki. W tym przypadku ciałem odniesienia jest dom, osie współrzędnych dobiera się tak, aby piłka leciała w płaszczyźnie XOY, a do określenia czasu służy stoper.
Matematycznie ruch ciała (lub punktu materialnego) względem wybranego układu odniesienia opisuje się równaniami, które określają, jak zmienia się on w czasie T współrzędne określające położenie ciała (punktu) w tym układzie odniesienia. Równania te nazywane są równaniami ruchu. Na przykład we współrzędnych kartezjańskich x, y, z ruch punktu określony jest równaniami , , .
We współczesnej fizyce każdy ruch jest względny, a ruch ciała należy rozpatrywać tylko w odniesieniu do innego ciała (ciała odniesienia) lub układu ciał. Nie da się np. wskazać jak Księżyc w ogóle się porusza, można jedynie określić jego ruch np. względem Ziemi, Słońca, gwiazd itp.
Inne definicje
Czasami – szczególnie w mechanice kontinuum i ogólnej teorii względności – układ odniesienia jest powiązany nie z jednym ciałem, ale z kontinuum rzeczywistych lub wyimaginowanych podstawowy obiekty odniesienia, które również definiują układ współrzędnych. Linie świata ciał odniesienia „wymiatają” czasoprzestrzeń i w tym przypadku wyznaczają zgodność, względem której można rozpatrywać wyniki pomiarów.
Względność ruchu
Względność ruchu mechanicznego– jest to zależność trajektorii ruchu ciała, przebytej drogi, przemieszczenia i prędkości od wyboru układu odniesienia.
Poruszające się ciała zmieniają swoje położenie względem innych ciał. Położenie samochodu jadącego autostradą zmienia się względem znaczników na słupkach kilometrowych, położenie statku pływającego po morzu w pobliżu brzegu zmienia się względem linii brzegowej, a ruch samolotu lecącego nad ziemią można ocenić na podstawie zmiany swojego położenia względem powierzchni Ziemi. Ruch mechaniczny to proces zmiany względnego położenia ciał w przestrzeni w czasie. Można wykazać, że to samo ciało może poruszać się inaczej względem innych ciał.
Można więc powiedzieć, że jakieś ciało porusza się tylko wtedy, gdy jest jasne, względem jakiego innego ciała – ciała odniesienia – zmieniło się jego położenie.
Absolutny układ odniesienia
Często w fizyce pewien układ odniesienia uważany jest za najwygodniejszy (uprzywilejowany) w ramach rozwiązania danego problemu - decyduje o tym prostota obliczeń lub zapis równań dynamiki znajdujących się w nim ciał i pól. Zazwyczaj możliwość ta jest powiązana z symetrią problemu.
Z drugiej strony dotychczas uważano, że istnieje pewien „fundamentalny” układ odniesienia, którego prostota zapisu praw natury odróżnia go od wszystkich innych systemów. Na przykład fizycy XIX wieku. wierzył, że układ, względem którego spoczywa eter elektrodynamiki Maxwella, jest uprzywilejowany i dlatego nazwano go Absolutnym Układem Odniesienia (AFR). We współczesnych koncepcjach nie istnieje tak wyodrębniony układ odniesienia, gdyż prawa natury wyrażone w formie tensorowej mają tę samą postać we wszystkich układach odniesienia – czyli we wszystkich punktach przestrzeni i we wszystkich momentach czasu. Warunek ten – lokalna niezmienność czasoprzestrzenna – jest jednym z weryfikowalnych fundamentów fizyki.
Zobacz też
Notatki
Fundacja Wikimedia. 2010.
Zobacz, co „System odniesienia” znajduje się w innych słownikach:
RAMY ODNIESIENIA- zbiór warunkowo niezmiennego układu ciał rzeczywistych lub abstrakcyjnych, z którymi jest powiązany (patrz), oraz zegar spoczywający w danym układzie współrzędnych. Taki system umożliwia określenie położenia lub ruchu badanego ciała względem niego (miliony... ... Wielka encyklopedia politechniczna
ramy Odniesienia- - [A.S. Goldberg. Angielsko-rosyjski słownik energii. 2006] Tematyka energii w ogólnym systemie odniesienia EN... Przewodnik tłumacza technicznego
W mechanice: zbiór układów współrzędnych i zegarów związanych z ciałem, w odniesieniu do którego badany jest ruch (lub równowaga) innych punktów lub ciał materialnych. Każdy ruch jest względny, a ruch ciała... ... Wielka encyklopedia radziecka
ramy Odniesienia- atskaitos sistema statusas T sritis fizika atitikmenys: engl. ramy Odniesienia; system odniesienia vok. Bezugssystem, n ros. układ odniesienia, f pranc. système de référence, m … Fizikos terminų žodynas
ramy Odniesienia- Układ współrzędnych związany z ciałem sztywnym (ciałami), względem którego wyznaczane jest położenie innych ciał (lub układów mechanicznych) w różnych momentach czasu... Politechniczny słownik terminologiczny objaśniający
W mechanice: zbiór układów współrzędnych i zsynchronizowanych zegarów związanych z ciałem, w odniesieniu do którego badany jest ruch (lub równowaga) innych punktów lub ciał materialnych. W zagadnieniach dynamiki dominującą rolę odgrywają... ... słownik encyklopedyczny
Rzeczywiste lub fikcyjne ciało sztywne, z powiązanym z nim układem współrzędnych, wyposażone w zegar i służące do określania położenia w przestrzeni badanych obiektów fizycznych. obiekty (cząstki, ciała itp.) różnego typu. chwile w czasie. Często pod S. o. zrozumieć... ... Wielki encyklopedyczny słownik politechniczny
W mechanice zbiór układów współrzędnych i synchronizacja. zegary związane z ciałem, w odniesieniu do rumu, bada się ruch (lub równowagę) k.n. inne materialne punkty lub ciała. W zagadnieniach dynamiki dominującą rolę odgrywają elementy inercyjne... ... Naturalna nauka. słownik encyklopedyczny
Ramy Odniesienia- – kontekst zewnętrzny, w którym zachodzi dane zdarzenie i w związku z tym, w odniesieniu do którego jest ono interpretowane lub oceniane. Takim kontekstem może być na przykład sytuacja społeczna, w której jednostka działa: W jednej sytuacji... ... Encyklopedyczny słownik psychologii i pedagogiki
Inercyjny układ odniesienia- układ odniesienia, w którym obowiązuje zasada bezwładności: punkt materialny, gdy nie działają na niego żadne siły (lub działają siły wzajemnie równoważące), znajduje się w stanie spoczynku lub jednostajnym ruchu liniowym. Dowolny system... ... Koncepcje współczesnych nauk przyrodniczych. Glosariusz podstawowych terminów