Arătați că sistemul de ecuații are o soluție unică. Găsirea soluțiilor unui sistem de ecuații liniare. Algebră liniară. Scrierea soluției generale a sistemelor algebrice liniare omogene și neomogene folosind vectori ai sistemului fundamental de soluții
Aplicații Windows portabile pe Bodrenko.com
§2. Găsirea soluțiilor unui sistem liniar
Teorema Kronecker-Capelli stabilește o condiție necesară și suficientă pentru compatibilitatea unui sistem liniar, dar nu oferă o modalitate de a găsi soluții la acest sistem.
În această secțiune, vom căuta soluții la sistemul liniar (3.1). În primul rând, vom lua în considerare cel mai simplu caz al unui sistem pătrat ecuatii lineare cu un determinant diferit de zero al matricei de bază și apoi treceți la găsirea setului tuturor soluțiilor unui sistem liniar general de formă (3.1).
1. Un sistem pătratic de ecuații liniare cu un determinant diferit de zero al matricei principale. Să se dea un sistem pătratic de ecuații liniare
cu un determinant nenul Δ al matricei principale

Să dovedim că un astfel de sistem are și, în plus, o soluție unică și vom găsi această soluție. În primul rând, dovedim că sistemul (3.10) poate avea o singură soluție (adică dovedim unicitatea unei soluții la sistemul (3.10) în ipoteza existenței sale).
Să presupunem că există unele n numere x 1, x 2, ..., xn astfel încât atunci când aceste numere sunt substituite în sistem (3.10), toate ecuațiile acestui sistem se transformă în identități (adică, există o soluție la sistem (3,10) x 1, x 2, ..., x n). Apoi, înmulțind identitățile (3.10), respectiv, cu complementele algebrice A 1j, A 2j, ..., A nj ale elementelor j-ro ale coloanei determinantului Δ al matricei (3.11) și apoi adăugând identitățile rezultate , obținem (pentru orice număr j, egal cu 1, 2, ..., n)
Ținând cont de faptul că suma produselor elementelor coloanei ith prin complementele algebrice corespunzătoare ale elementelor coloanei j-ro este egală cu zero pentru i ≠ j și este egală cu determinantul Δ al matricei (3.11 ) pentru i = j (vezi proprietatea 4 ° din subsecțiunea 4 din secțiunea 2 din cap. 1), obținem din ultima egalitate
x j Δ = b 1 A 1j + b 2 A 2j + ... + b n A nj. (3.12)
Să notăm prin simbolΔ
j (b eu ) (sau, mai pe scurt, simbolulΔ
j ) determinant obținut din determinantΔ
a matricei principale (3.11) prin înlocuirea coloanei sale jth cu o coloană de termeni liberi b 1
, b 2
, ..., b n (păstrând toate celelalte coloane neschimbate
Δ
).
Rețineți că în partea dreaptă a (3.12) există exact determinantul Δ j (bi) (pentru a fi convins de acest lucru, este suficient să scrieți expansiunea determinantului Δ j (bi) în termeni de elemente ale a doua coloană), iar această egalitate ia forma
Δ x j = Δ j (3.13)
Deoarece determinantul Δ al matricei (3.11) este diferit de zero, egalitățile (3.13) sunt echivalente cu relațiile
Deci, am demonstrat asta dacă soluția x 1
, X 2
, ..., NS n sistem (3.10) cu determinantΔ
din matricea principală (3.11), alta decât zero, atunci această soluție este determinată în mod unic de formule (3.14).
Se numesc formule (3.14) Formulele lui Cramer.
Subliniem încă o dată că am obținut până acum formulele lui Cramer în ipoteza existenței unei soluții și dovedim unicitatea acesteia.
Rămâne să dovedim existența unei soluții la sistem (3.10). Pentru aceasta, în virtutea teoremei Kronecker-Capelli, este suficient să se demonstreze că rangul matricei principale (3.11) este egal cu rangul matricei extinse (există, de asemenea, un alt mod de a demonstra existența unei soluții la sistem (3.10), care constă în verificarea faptului că numerele x 1, x 2, .., х n, definite de formulele lui Cramer (3.14), convertesc toate ecuațiile sistemului (3.10) în identități)

dar acest lucru este evident, deoarece în virtutea relației Δ ≠ 0, rangul matricei principale este egal cu n, iar rangul matricei extinse (3.15) care conține n rânduri nu poate fi mai mare decât n și, prin urmare, este egal la rangul matricei principale.
Astfel, este complet dovedit că sistemul pătratic al ecuațiilor liniare (3.10) cu un determinant diferit de zero al matricei de bază are și, în plus, o soluție unică determinată de formulele lui Cramer (3.14).
Afirmația pe care am dovedit-o este chiar mai ușor de stabilit într-un mod matricial. Pentru a face acest lucru, înlocuim (ca în subsecțiunea 1 din § 1) sistemul (3.10) cu ecuația matricei echivalentă
AX = B, (3,16)
unde A este matricea principală a sistemului (3.11), iar X și B sunt coloane,
primul dintre care urmează să fie determinat, iar al doilea este dat.
Deoarece determinantul Δ al matricei A este diferit de zero, atunci există o matrice inversă A -1 (a se vedea paragraful 7 din §2, capitolul 1).
Să presupunem că există o soluție la sistem (3.10), adică există o coloană X care face din ecuația matricei (3.16) o identitate. Înmulțind identitatea indicată în stânga cu matricea inversă А -1 vom avea
A -1 (AX) = A -1 B. (3,17)
Să luăm acum în considerare faptul că, în virtutea proprietății combinatorii a produsului a trei matrice (a se vedea subsecțiunea 2 din § 1 din cap. 1) și în virtutea relației A -1 A = E, unde E este matricea identitară (vezi § 7 din § 2 din Cap. 1), A -1 (AX) = (A -1 A) X = EX = X, deci obținem de la (3.17)
X = A -1 B. (3,18)
Extinderea egalității (3.18) și luarea în considerare a formei matricei inverse (a se vedea formula A.41) din secțiunea 7, secțiunea 2, cap. 1), obținem formulele lui Cramer pentru elementele coloanei X.
Deci, am demonstrat că, dacă există o soluție la ecuația matricei (3.16), atunci aceasta este determinată în mod unic de relația (3.18), care este echivalentă cu formulele lui Cramer.
Este ușor să verificați dacă coloana X definită prin relația (3.18) este într-adevăr o soluție la ecuația matricei (3.16),
adică, atunci când este substituită în această ecuație, o transformă într-o identitate. Într-adevăr, dacă coloana X este definită de egalitate (3.18), atunci AX = A (A -1 B) = (AA -1) B = EB = B.
Deci, dacă determinantul Δ al matricei A este diferit de zero (adică dacă această matrice este nedegenerată), atunci există și, în plus, o soluție unică la ecuația matricei (3.16), definită prin relația (3.18), echivalent cu formulele lui Cramer.
Exemplu. Să găsim soluția la sistemul pătratic al ecuațiilor liniare

cu un determinant nenul al matricei principale
În măsura în care

apoi, în virtutea formulelor lui Cramer, singura soluție a sistemului în cauză are forma x 1 = 1, x 2 = 2, x 3 = 3, x 4 = 4.
Principala semnificație a formulelor lui Cramer este că acestea dau o expresie explicită pentru rezolvarea unui sistem pătratic de ecuații liniare (cu un determinant diferit de zero) în ceea ce privește coeficienții ecuațiilor și termenii liberi. Utilizarea practică a formulelor lui Cramer este asociată cu calcule destul de greoaie (pentru a rezolva un sistem de n ecuații cu n necunoscute, este necesar să se calculeze determinantul (n + 1) al ordinului n). La aceasta trebuie adăugat că, dacă coeficienții ecuațiilor și termenii liberi sunt doar valori aproximative ale oricăror mărimi fizice măsurate sau sunt rotunjite în procesul de calcule, atunci utilizarea formulelor lui Cramer poate duce la erori mari și în unele cazuri sunt inadecvate.
În secțiunea 4, capitolul 4, metoda de regularizare datorată lui A.N. Tihonov și vă permite să găsiți o soluție la un sistem liniar cu o precizie corespunzătoare preciziei specificării matricei coeficienților de ecuații și a unei coloane de termeni liberi, și în Ch. 6 oferă o idee despre așa-numitele metode iterative pentru rezolvarea sistemelor liniare, care fac posibilă rezolvarea acestor sisteme folosind aproximări succesive ale necunoscutelor.
În concluzie, observăm că în această subsecțiune am exclus de la considerare cazul dispariției determinantului Δ al matricei principale a sistemului (3.10). Acest caz va fi cuprins în teoria generală a sistemelor de m ecuații liniare cu n necunoscute, prezentată în subsecțiunea următoare.
2. Găsirea tuturor soluțiilor unui sistem liniar general. Să considerăm acum un sistem general de m ecuații liniare cu n necunoscute (3.1). Să presupunem că acest sistem este consistent și că rangul matricilor sale principale și extinse este egal cu r. Fără pierderea generalității, putem presupune că minorul de bază al matricei principale (3.2) se află în colțul din stânga sus al acestei matrice (cazul general este redus la acest caz permutând ecuații și necunoscute în sistem (3.1)).
Apoi, primele rânduri r ale matricei principale (3.2) și ale matricei extinse (3.8) sunt rândurile de bază ale acestor matrice (deoarece rândurile matricei principale și extinse sunt ambele egale cu r, minorul de bază al matricei principale va fi simultan minorul de bază al matricei extinse) și, conform teoremei 1.6 asupra minorului de bază, fiecare dintre rândurile matricei extinse (1.8), începând de la (r + 1) al treilea rând, este o combinație liniară de primele r rânduri ale acestei matrice.
În ceea ce privește sistemul (3.1), aceasta înseamnă că fiecare dintre ecuațiile acestui sistem, începând cu ecuația (r + 1), este o combinație liniară (adică o consecință) a primelor ecuații r ale acestui sistem ( adică, orice soluție a primelor ecuații ale sistemului (3.1) se transformă în identități și toate ecuațiile ulterioare ale acestui sistem).
Astfel, este suficient să găsim toate soluțiile numai primelor ecuații ale sistemului (3.1). Luați în considerare primele ecuații ale sistemului (3.1), scriindu-le în formă
Dacă dăm necunoscutelor xr + 1, ..., xn valori complet arbitrare cr + 1, ..., cn, atunci sistemul (1.19) se va transforma într-un sistem pătratic de r ecuații liniare pentru r necunoscute x 1, x 2, ..., х r, iar determinantul matricei de bază a acestui sistem este un minor de bază diferit de zero al matricei (3.2). În virtutea rezultatelor secțiunii anterioare, acest sistem (3.19) are o soluție unică definită de formulele lui Cramer, adică pentru cr + 1, ..., cn ales în mod arbitrar, există o colecție unică r de numere c 1, ..., cr, convertind toate ecuațiile sistemului (3.19) în identități și definite de formulele lui Cramer.
Pentru a scrie această soluție unică, suntem de acord să notăm prin simbolul M j (di) determinantul obținut din minorul de bază M al matricei (3.2) prin înlocuirea coloanei sale j-ro cu o coloană de numere d 1, d 2, ..., di, ..., dr (păstrând neschimbate toate celelalte M coloane). Apoi, notând soluția sistemului (3.19) folosind formulele lui Cramer și folosind proprietatea liniară a determinantului, obținem

Formulele (3.20) exprimă valorile necunoscutelor xj = cj (j = 1, 2, ......, r) în ceea ce privește coeficienții necunoscutelor, termenii liberi și parametrii specificați în mod arbitrar cu r + 1 , ...., cu n.
Să dovedim asta formulele (3.20) conțin orice soluție a sistemului (3.1)... Într-adevăr, fie c (0) 1, c (0) 2, ..., c (0) r, c (0) r + 1, ..., c (0) n să fie o soluție arbitrară a sistemului indicat . Apoi este, de asemenea, o soluție la sistem (3.19). Dar din sistemul (3.19) cantitățile c (0) 1, c (0) 2, ..., c (0) r, sunt determinate în funcție de cantitățile c (0) r + 1, ..., c (0) n unic și precis prin formulele lui Cramer (3.20). Astfel, pentru c r + 1 = c (0)
r + 1, ..., cu n = c (0)
n
formulele (3.20) ne oferă doar soluția luată în considerare c (0)
1
, c (0)
2
, ..., c (0)
r , c (0)
r + 1, ..., c (0)
n .
Cometariu. Dacă rangul r al matricilor principale și extinse ale sistemului (3.1) este egal cu numărul de necunoscute n, atunci în acest caz relațiile (3.20) se transformă în formule
![]()
determinarea soluției unice a sistemului (3.1). Astfel, sistemul (3.1) are o soluție unică (adică este definitivă) cu condiția ca rangul r al matricilor sale principale și extinse să fie egal cu numărul de necunoscute n (și este mai mic sau egal cu numărul de ecuații m).
Exemplu. Găsiți toate soluțiile sistemului liniar
Este ușor să verificăm dacă rangul matricii principale și extinse ale acestui sistem este egal cu două (adică acest sistem este consistent) și putem presupune că minorul de bază M se află în colțul din stânga sus al matricei principale , adică ![]() ... Dar apoi, eliminând ultimele două ecuații și stabilind în mod arbitrar cu 3 și cu 4, obținem sistemul
... Dar apoi, eliminând ultimele două ecuații și stabilind în mod arbitrar cu 3 și cu 4, obținem sistemul
x 1 - x 2 = 4 - c 3 + c 4,
x 1 + x 2 = 8 - 2c 3 - 3c 4,
din care, în virtutea formulelor lui Cramer, obținem valorile
x 1 = c 1 = 6 - 3/2 c 3 - c 4, x 2 = c 2 = 2 - 1/2 c 3 - 2c 4. (3,22)
Deci cele patru numere
(6 - 3/2 c 3 - c 4, 2 - 1/2 c 3 - 2c 4, c 3, c 4) (3.23)
pentru că valorile date arbitrar de с 3 și с 4 formează o soluție a sistemului (3.21), iar rândul (3.23) conține toate soluțiile acestui sistem.
3. Proprietățile setului de soluții ale unui sistem omogen. Luați în considerare acum un sistem omogen de m ecuații liniare cu n necunoscute (3.7), presupunând, ca mai sus, că matricea (3.2) are rang egal cu r și că minorul de bază М este situat în colțul din stânga sus al acestei matrice. Din moment ce toți b i sunt egali cu zero, în loc de formule (3.20) obținem următoarele formule:
exprimând valorile necunoscutelor x j = c j (j = 1, 2, ..., r) din punct de vedere al coeficienților necunoscutelor și valorilor date arbitrar c r + 1, ..., c n. În virtutea a ceea ce s-a dovedit în paragraful anterior formulele (3.24) conțin orice soluție la sistemul omogen (3.7).
Să verificăm acum că colecția dintre toate soluțiile sistemului omogen (3.7) formează spațiul liniar.
Fie X 1 = (x (1) 1, x (1) 2, ..., x (1) n) și X 2 = (x (2) 1, x (2) 2, ..., x ( 2) n) sunt două soluții arbitrare ale sistemului omogen (3.7), iar λ este orice număr real. Deoarece fiecare soluție a sistemului omogen (3.7) este un element al spațiului liniar А n al tuturor colecțiilor ordonate de n numere, este suficient să se demonstreze că fiecare dintre cele două colecții
X 1 + X 2 = (x (1) 1 + x (2) 1, ..., x (1) n + x (2) n)
λ X 1 = (λ x (1) 1, ..., λ x (1) n)
este, de asemenea, o soluție la sistemul omogen (3.7).
Luați în considerare orice ecuație a sistemului (3.7), de exemplu ecuația i, și înlocuiți în această ecuație în locul elementelor necunoscute ale seturilor specificate. Având în vedere că X 1 și X 2 sunt soluții ale unui sistem omogen, vom avea

iar acest lucru înseamnă că colecțiile X 1 + X 2 și λ X 1 sunt soluții ale sistemului omogen (3.7).
Astfel, mulțimea tuturor soluțiilor sistemului omogen (3.7) formează un spațiu liniar, pe care îl notăm cu R.
Să găsim dimensiunea acestui spațiu R și să construim o bază în el.
Să dovedim că, în ipoteza că rangul matricei sistemului omogen (3.7) este egal cu r, spațiul liniar R al tuturor soluțiilor sistemului omogen (3.7) este izomorf pentru spațiul liniar A n-r dintre toate colecțiile ordonate (n - r) de numere(spațiul n A m a fost introdus în exemplul 3, secțiunea 1, secțiunea 1, capitolul 2).
Asociem fiecare soluție (c 1, ..., c r, c r + 1, ..., c n) a sistemului omogen (3.7) cu un element (c r + 1, ..., c n) al spațiului A n-r Deoarece numerele c r + 1, ..., c n pot fi alese în mod arbitrar și pentru fiecare alegere folosind formulele (3.24) se determină în mod unic soluția sistemului (3.7), corespondența pe care am stabilit-o este unu la unu... Mai mult, rețineți că dacă elementele c (1) r + 1, ..., c (1) n și c (2) r + 1, ..., c (2) n ale spațiului A n-r corespund elementelor (c (1) 1, ..., c (1) r, c (1) r + 1, ..., c (1) n) și (c (2) 1, ... , c (2) r, c (2) r + 1, ..., c (2) n) din spațiul R, apoi formulele (3.24) implică imediat faptul că elementul (c (1) r + 1 + c (2) r + 1, ..., c (1) n + c (2) n) corespunde elementului (c (1) 1 + c (2) 1, ..., c (1) r + c (2) r, c (1) r + 1 + c (2) r + 1, ..., c (1) n + c (2) n) și elementul (λ c (1) r + 1, ..., λ c (1) n) pentru orice λ reală corespunde un element (λ c (1) 1, ..., λ c (1) r, λ c (1) r + 1,. .., λ c (1) n). Aceasta demonstrează că corespondența pe care am stabilit-o este un izomorfism.
Astfel, spațiul liniar R al tuturor soluțiilor sistemului omogen (3.7) cu n necunoscute și rangul matricei principale egal cu r este izomorf pentru spațiu A n-rși, prin urmare, are dimensiunea n - r.
Orice colecție de (n - r) soluții liniar independente la sistemul omogen (3.7) formează (prin teorema 2.5) o bază în spațiul R al tuturor soluțiilor și se numește colecția fundamentală de soluții la sistemul omogen (3.7).
Pentru a construi un set fundamental de soluții, puteți trece de la orice bază de spațiu A n-r... Setul de soluții ale sistemului (3.7) corespunzător acestei baze, datorită izomorfismului, va fi liniar independent și, prin urmare, va fi un set fundamental de soluții.
Setul fundamental de soluții ale sistemului (3.7) se deosebește în special, corespunzând celei mai simple baze e 1 = (1, 0, 0, ..., 0), e 2 = (1, 1, 0, ..., 0), ..., е nr = (0, 0, 0, ..., 1) al spațiului A n-rși numit setul fundamental de soluții normale la sistemul omogen (3.7).
Conform ipotezelor de mai sus cu privire la rangul și locația minorului de bază, în virtutea formulelor (3.24), setul normal de soluții fundamentale la sistemul omogen (3.7) are forma:

Prin definiția bazei, orice soluție X a sistemului omogen (3.7) poate fi reprezentată în formă
X = C 1 X 1 + C 2 X 2 + ... + C n-r X n-r, (3.26)
unde C 1, C 2, ..., C n-r sunt unele constante. Deoarece formula (3.26) conține orice soluție la sistemul omogen (3.7), această formulă oferă o soluție generală sistemului omogen considerat.
Exemplu. Luați în considerare un sistem omogen de ecuații:
corespunzând sistemului neomogen (3.21) analizat în exemplul de la sfârșitul secțiunii anterioare. Acolo am aflat că rangul r al matricei acestui sistem este egal cu două și a luat ca bază minorul din colțul din stânga sus al matricei indicate.
Repetând raționamentul la sfârșitul secțiunii anterioare, obținem, în loc de formule (3.22), relațiile
c 1 = - 3/2 c 3 - c 4, c 2 = - 1/2 c 3 - 2c 4,
valabil pentru c 3 și c 4 alese în mod arbitrar. Folosind aceste relații (presupunând mai întâi c 3 = 1, c 4 = 0 și apoi c 3 = 0, c 4 = 1) obținem un set fundamental normal de două soluții ale sistemului (3.27):
X 1 = (-3 / 2, -1 / 2,1,0), X 2 = (-1, -2, 0,1). (3,28)
unde C 1 și C 2 sunt constante arbitrare.
Pentru a încheia această subsecțiune, stabilim o legătură între soluțiile sistemului liniar neomogen (3.1) și sistemul omogen corespunzător (3.7) (cu aceiași coeficienți pentru necunoscute). Să dovedim următoarele două afirmații.
1 °. Suma oricărei soluții la sistemul neomogen (3.1) cu orice soluție la sistemul omogen corespunzător (3.7) este o soluție la sistemul (3.1).
Într-adevăr, dacă c 1, ..., cn este o soluție a sistemului (3.1), ad 1, ..., dn este o soluție a sistemului omogen corespunzător (3.7), apoi, înlocuind în oricare (de exemplu, în i) ecuația sistemului (3.1) în locul numerelor necunoscute c 1 + d 1, ..., cn + dn, obținem
Q.E.D.
2 °. Diferența a două soluții arbitrare la sistemul neomogen (3.1) este o soluție la sistemul omogen corespunzător (3.7).
Într-adevăr, dacă c "1, ..., c" n și c "1, ..., c" n sunt două soluții arbitrare ale sistemului (3.1), atunci, înlocuind în orice (de exemplu, în ith) ecuație a sistemului (3.7) în locul numerelor necunoscute c "1 - c" 1, ..., c "n - c" n, obținem
Q.E.D.
Din afirmațiile dovedite rezultă că, găsind o soluție la sistemul neomogen (3.1) și adăugând-o la fiecare soluție a sistemului omogen corespunzător (3.7), obținem toate soluțiile la sistemul neomogen (3.1).
Cu alte cuvinte, suma unei soluții particulare a sistemului neomogen (3.1) și a soluției generale a sistemului omogen corespunzător (3.7) oferă soluția generală a sistemului neomogen (3.1).
Ca soluție specială a sistemului neomogen (3.1), este firesc să luăm soluția sa (în acest caz, se presupune, ca mai sus, că rândurile matricilor principale și extinse ale sistemului (3.1) sunt egale cu r și că minorul de bază se află în colțul din stânga sus al acestor matrice)
care se va obține dacă toate numerele c r + 1, ..., c n sunt stabilite egale cu zero în formulele (3.20). Adăugând această soluție specială cu soluția generală (3.26) a sistemului omogen corespunzător, obținem următoarea expresie pentru soluția generală a sistemului neomogen (3.1):
X = X 0 + C 1 X 1 + C 2 X 2 + ... + C n-r X n-r. (3,30)
În această expresie, X 0 denotă o anumită soluție (3.29), C 1, C 2, ..., C nr sunt constante arbitrare, iar X 1, X 2, ..., X nr sunt elemente ale setului fundamental normal de soluții (3.25) sistem omogen corespunzător.
Deci, pentru sistemul neomogen (3.21) considerat la sfârșitul secțiunii anterioare, soluția particulară a formei (3.29) este egală cu X 0 = (6,2,0,0).
Adăugând această soluție specială cu soluția generală (3.28) a sistemului omogen corespunzător (3.27), obținem următoarea soluție generală a sistemului neomogen (3.21):
X = (6,2,0,0) + C1 (-3 / 2, -1 / 2,1,0) + C2 (-1, -2, 0,1). (3,31)
Aici C 1 și C 2 sunt constante arbitrare.
4. Observații finale privind rezolvarea sistemelor liniare. Metode de rezolvare a sistemelor liniare dezvoltate în paragrafele anterioare
alergă împotriva nevoii de a calcula rangul matricei și de a găsi minorul său de bază. După găsirea minorului de bază, soluția se reduce la tehnica de calcul a determinanților și la utilizarea formulelor lui Cramer.
Pentru a calcula rangul unei matrice, puteți utiliza următoarea regulă: atunci când se calculează rangul unei matrice, ar trebui să treacă de la minori cu ordin inferior la minori cu ordin mai mare; mai mult, dacă a fost găsit deja un minor M zero de ordinul k, atunci doar minorii de ordine (k + 1) limitrofi(adică conținând o minoră M) acest minor este M; dacă toți minorii de graniță de ordin (k + 1) sunt egali cu zero, rangul matricei este egal cu k(de fapt, în acest caz, toate rândurile (coloanele) matricei aparțin corpului liniar al celor k rânduri (coloane), la intersecția căruia există un M minor, iar dimensiunea corpului liniar indicat este egală la k).
Să indicăm o altă regulă pentru calcularea rangului unei matrice. Rețineți că cu rânduri (coloane) ale unei matrice se poate produce trei operații elementare care nu schimbă rangul acestei matrice: 1) permutarea a două rânduri (sau două coloane), 2) multiplicarea unui rând (sau coloană) cu orice factor diferit de zero, 3) adăugarea la un rând (coloană) a unei combinații liniare arbitrare altor rânduri (coloane) (aceste trei operații nu modifică rangul matricei datorită faptului că operațiile 1) și 2) nu modifică numărul maxim de rânduri (coloane) liniar independente ale matricei și operația 3) are proprietatea că coca liniară a tuturor rândurilor (coloanelor) disponibilă înainte de această operație, coincide cu anvelopa liniară a tuturor rândurilor (coloanelor) obținute după această operație).
Spunem că matricea || a ij ||, care conține m rânduri și n coloane, are diagonală forma, dacă toate elementele sale sunt egale cu zero, altele decât a 11, a 22, .., a rr, unde r = min (m, n). Rangul unei astfel de matrice este evident r.
Să ne asigurăm că prin intermediul a trei operații elementare orice matrice

poate fi redus la formă diagonală(ceea ce ne permite să-i calculăm rangul).
Într-adevăr, dacă toate elementele matricei (3.31) sunt egale cu zero, atunci această matrice a fost deja redusă la o formă diagonală. Dacă mat-
Dacă matricea (3.31) are elemente diferite de zero, atunci prin permutarea a două rânduri și două coloane este posibil să se realizeze că elementul a 11 este diferit de zero. După aceea, înmulțind primul rând al matricei cu un 11 -1, vom transforma elementul a 11 într-unul. Scăderea suplimentară din coloana j-ro a matricei (pentru j = 2, 3, ..., n) prima coloană, înmulțită cu un i1 și apoi scăderea din a i-a linie(pentru i = 2, 3, ..., n) primul rând, înmulțit cu un i1, obținem în loc de (3.31) o matrice de următoarea formă:

Efectuând operațiile deja descrise de noi cu matricea, luate în cadru și continuând să acționăm în mod similar, după un număr finit de pași vom obține o matrice de formă diagonală.
Metodele de rezolvare a sistemelor liniare descrise în paragrafele anterioare, care utilizează în cele din urmă aparatul formulelor lui Cramer, pot duce la erori mari în cazul în care valorile coeficienților ecuațiilor și termenilor liberi sunt date aproximativ sau când aceste valori Sunt rotunjite în timpul calculelor.
În primul rând, acest lucru se referă la cazul în care matricea corespunzătoare determinantului principal (sau minorului de bază) este prost condiționat(adică, atunci când modificările „mici” în elementele acestei matrice corespund modificărilor „mari” în elementele matricei inverse). Bineînțeles, în acest caz, soluția la sistemul liniar va fi instabil(adică, modificările „mari” ale soluției vor corespunde unor modificări „mici” ale valorilor coeficienților ecuațiilor și termenilor liberi).
Aceste circumstanțe conduc la necesitatea dezvoltării atât a altor algoritmi teoretici (diferiți de formulele lui Cramer) pentru găsirea unei soluții, cât și a metodelor numerice pentru rezolvarea sistemelor liniare.
În secțiunea 4, capitolul 4, vom face cunoștință cu prin metoda de regularizare A.N. Tihonov găsind așa-numitul normal(adică cea mai apropiată de origine) soluție a sistemului liniar.
Capitolul 6 va oferi informații de bază despre așa-numitele metode iterative soluții de sisteme liniare care permit rezolvarea acestor sisteme folosind aproximări succesive ale necunoscutelor.
- Sisteme m ecuații liniare cu n necunoscut.
Rezolvarea unui sistem de ecuații liniare Este un astfel de set de numere ( x 1, x 2, ..., x n), atunci când este înlocuit în fiecare dintre ecuațiile sistemului, se obține egalitatea corectă.
Unde a ij, i = 1, ..., m; j = 1, ..., n- coeficienții sistemului;
b i, i = 1, ..., m- membri liberi;
x j, j = 1, ..., n- necunoscut.
Sistemul de mai sus poate fi scris sub formă de matrice: A X = B,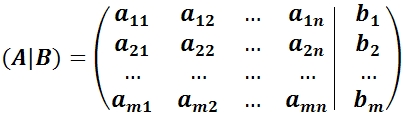

Unde ( A|B) Este matricea principală a sistemului;
A- matrice de sistem extinsă;
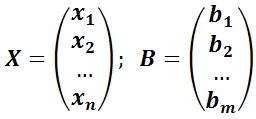
X- coloana necunoscutelor;
B- coloana membrilor liberi.
Dacă matricea B nu este o matrice nulă ∅, atunci acest sistem de ecuații liniare se numește neomogen.
Dacă matricea B= ∅, atunci acest sistem de ecuații liniare se numește omogen. Un sistem omogen are întotdeauna o soluție zero (banală): x 1 = x 2 =…, x n = 0.
Sistem comun de ecuații liniare Este un sistem de ecuații liniare care are o soluție.
Sistem incoerent de ecuații liniare Este un sistem de ecuații liniare care nu are soluție.
Un sistem definit de ecuații liniare Este un sistem de ecuații liniare care are o soluție unică.
Sistem nedefinit de ecuații liniare Este un sistem de ecuații liniare care are un set infinit de soluții. - Sisteme de n ecuații liniare cu n necunoscute
Dacă numărul de necunoscute este egal cu numărul de ecuații, atunci matricea este pătrată. Determinantul unei matrice se numește determinantul principal al unui sistem de ecuații liniare și este notat cu simbolul Δ.
Metoda lui Cramer pentru a rezolva sisteme n ecuații liniare cu n necunoscut.
Regula lui Cramer.
Dacă principalul determinant al unui sistem de ecuații liniare nu este egal cu zero, atunci sistemul este consistent și definit, iar singura soluție este calculată prin formulele lui Cramer:
unde Δ i - determinanți obținuți din determinantul principal al sistemului Δ prin înlocuire eu a coloană pe coloană de membru liber. ... - Sisteme de m ecuații liniare cu n necunoscute
Teorema Kronecker-Capelli.
Pentru ca un sistem dat de ecuații liniare să fie consecvent, este necesar și suficient ca rangul matricei sistemului să fie egal cu rangul matricei extinse a sistemului, sunat (Α) = sunat (Α | B).
Dacă sunat (Α) ≠ sunat (Α | B), atunci sistemul cu siguranță nu are soluții.
Dacă sunat (Α) = sunat (Α | B), atunci sunt posibile două cazuri:
1) sunat (Α) = n(la numărul de necunoscute) - soluția este unică și poate fi obținută prin formulele lui Cramer;
2) sunat (Α)< n - există infinit de multe soluții. - Metoda Gauss pentru rezolvarea sistemelor de ecuații liniare
Să alcătuim o matrice extinsă ( A|B) a unui sistem dat de coeficienți pe laturile necunoscute și pe partea dreaptă.
Metoda Gauss sau metoda de eliminare a necunoscutelor constă în reducerea matricei extinse ( A|B) cu ajutorul transformărilor elementare peste rândurile sale la forma diagonală (la forma triunghiulară superioară). Revenind la sistemul de ecuații, toate necunoscutele sunt determinate.
Transformările elementare peste șiruri includ următoarele:
1) schimbarea a două linii;
2) înmulțirea unui șir cu un număr diferit de 0;
3) adăugarea la șir a altui șir înmulțit cu un număr arbitrar;
4) aruncarea șirului nul.
O matrice extinsă redusă la o formă diagonală corespunde unui sistem liniar echivalent cu cel dat, a cărui soluție nu provoacă dificultăți. ... - Sistem de ecuații liniare omogene.
Un sistem omogen arată ca:
corespunde ecuației matricei A X = 0.
1) Un sistem omogen este întotdeauna compatibil, deoarece r (A) = r (A | B), există întotdeauna o soluție zero (0, 0, ..., 0).
2) Pentru ca un sistem omogen să aibă o soluție diferită de zero, este necesar și suficient ca r = r (A)< n , care este echivalent cu Δ = 0.
3) Dacă r< n , apoi deliberat Δ = 0, apoi apar necunoscute libere c 1, c 2, ..., c n-r, sistemul are soluții netriviale și există infinit multe dintre ele.
4) Soluție generală X la r< n poate fi scris sub formă de matrice după cum urmează:
X = c 1 X 1 + c 2 X 2 + ... + c n-r X n-r,
unde sunt soluțiile X 1, X 2, ..., X n-r formează un sistem fundamental de decizii.
5) Sistemul fundamental de soluții poate fi obținut din soluția generală a unui sistem omogen: ,
,
dacă valorile parametrilor sunt presupuse secvențial ca fiind (1, 0, ..., 0), (0, 1, ..., 0), ..., (0, 0, ..., 1).
Descompunerea soluției generale în ceea ce privește sistemul fundamental de soluții Este o înregistrare a unei soluții generale sub forma unei combinații liniare de soluții aparținând sistemului fundamental.
Teorema... Pentru ca un sistem de ecuații liniare omogene să aibă o soluție diferită de zero, este necesar și suficient ca Δ ≠ 0.
Deci, dacă determinantul Δ ≠ 0, atunci sistemul are o soluție unică.
Dacă Δ ≠ 0, atunci sistemul de ecuații liniare omogene are un set infinit de soluții.
Teorema... Pentru ca un sistem omogen să aibă o soluție diferită de zero, este necesar și suficient ca r (A)< n .
Dovadă:
1) r nu poate fi mai mult n(rangul matricei nu depășește numărul de coloane sau rânduri);
2) r< n de cand dacă r = n, atunci principalul determinant al sistemului este Δ ≠ 0 și, conform formulelor lui Cramer, există o soluție trivială unică x 1 = x 2 = ... = x n = 0, care contrazice condiția. Mijloace, r (A)< n .
Consecinţă... Pentru un sistem omogen n ecuații liniare cu n necunoscute are o soluție diferită de zero, este necesar și suficient ca Δ = 0.
După cum reiese din Teoremele lui Cramer, la rezolvarea unui sistem de ecuații liniare, pot apărea trei cazuri:
Primul caz: un sistem de ecuații liniare are o soluție unică
(sistemul este consecvent și definit)
 Al doilea caz: un sistem de ecuații liniare are un număr infinit de soluții
Al doilea caz: un sistem de ecuații liniare are un număr infinit de soluții
(sistemul este consecvent și nedefinit)
** ![]() ,
,
acestea. coeficienții necunoscutelor și termenii liberi sunt proporționali.
 Al treilea caz: sistemul de ecuații liniare nu are soluții
Al treilea caz: sistemul de ecuații liniare nu are soluții
(sistem neconform)
Deci sistemul m ecuații liniare cu n se numesc variabile inconsecvent dacă nu are soluții și comun dacă are cel puțin o soluție. Se numește un sistem comun de ecuații care are o singură soluție un anumitși mai mult de unul - nedefinit.
Exemple de rezolvare a sistemelor de ecuații liniare prin metoda lui Cramer
Să fie dat sistemul
 .
.
Bazat pe teorema lui Cramer
………….
,
Unde  -
-
determinant de sistem. Obținem determinanții rămași înlocuind coloana cu coeficienții variabilei corespunzătoare (necunoscute) cu termeni liberi:



Exemplul 2.
 .
.

Prin urmare, sistemul este definit. Pentru a găsi soluția sa, calculăm determinanții



Conform formulelor lui Cramer, găsim:
![]()
Deci, (1; 0; -1) este singura soluție a sistemului.
Pentru a verifica soluțiile sistemelor de ecuații 3 X 3 și 4 X 4, puteți utiliza calculatorul online care rezolvă metoda Cramer.
Dacă în sistemul de ecuații liniare într-una sau mai multe ecuații nu există variabile, atunci în determinant elementele corespunzătoare sunt egale cu zero! Acesta este următorul exemplu.
Exemplul 3. Rezolvați un sistem de ecuații liniare prin metoda lui Cramer:
 .
.
Soluţie. Găsim determinantul sistemului:

Priviți cu atenție sistemul de ecuații și determinantul sistemului și repetați răspunsul la întrebarea în care cazuri unul sau mai multe elemente ale determinantului sunt egale cu zero. Deci, determinantul nu este egal cu zero, prin urmare, sistemul este definit. Pentru a găsi soluția sa, calculăm factorii determinanți pentru necunoscute



Conform formulelor lui Cramer, găsim:
Deci, soluția sistemului este (2; -1; 1).
6. Sistem general liniar ecuații algebrice... Metoda Gauss.
După cum ne amintim, regula lui Cramer și metoda matricei nu sunt aplicabile în cazurile în care sistemul are infinit de multe soluții sau este inconsecvent. Metoda Gauss – cel mai puternic și versatil instrument pentru găsirea de soluții la orice sistem de ecuații liniare, pe care în fiecare caz ne va conduce la răspuns! Algoritmul metodei în sine funcționează la fel în toate cele trei cazuri. Dacă cunoașterea factorilor determinanți este necesară în metodele Cramer și matrice, atunci pentru a aplica metoda Gauss, este necesară doar cunoașterea operațiilor aritmetice, ceea ce o face accesibilă chiar și pentru școlari clase primare.
În primul rând, să sistematizăm cunoștințele despre sistemele de ecuații liniare. Un sistem de ecuații liniare poate:
1) Aveți o soluție unică.
2) Aveți infinit de multe soluții.
3) Nu aveți soluții (fi inconsecvent).
Metoda Gaussian este cel mai puternic și versatil instrument pentru găsirea unei soluții orice sisteme de ecuații liniare. După cum ne amintim Regula lui Cramer și metoda matricei nepotrivit în cazurile în care sistemul are infinit de multe soluții sau este incompatibil. Și metoda eliminării succesive a necunoscutelor oricum ne va conduce la răspuns! În această lecție, vom lua din nou în considerare metoda Gauss pentru cazul nr. 1 (singura soluție a sistemului), un articol este rezervat situației punctelor nr. 2-3. Rețineți că algoritmul metodei în sine funcționează la fel în toate cele trei cazuri.
Să revenim la cel mai simplu sistem din lecție Cum se rezolvă un sistem de ecuații liniare?
și rezolvați-o prin metoda Gauss.
În prima etapă, trebuie să scrieți matrice extinsă de sistem:
... Cred că pe ce principiu se scriu coeficienții, toată lumea poate vedea. Bara verticală din interiorul matricei nu are nicio semnificație matematică - este doar un subliniat pentru ușurința proiectării.
referinţă:Vă recomand să vă amintiți termeni algebră liniară. Matrice de sistem Este o matrice compusă doar din coeficienți cu necunoscute, în acest exemplu matricea sistemului:. Matricea sistemului extins- aceasta este aceeași matrice a sistemului plus o coloană de membri liberi, în acest caz:. Oricare dintre matrici poate fi numită pur și simplu o matrice pentru concizie.
După ce matricea extinsă a sistemului este notată, este necesar să efectuați câteva acțiuni cu acesta, care sunt, de asemenea, numite transformări elementare.
Există următoarele transformări elementare:
1) Siruri de caractere matrici poate fi rearanjat locuri. De exemplu, în matricea luată în considerare, puteți rearanja fără durere primul și al doilea rând: 
2) Dacă matricea conține (sau apare) rânduri proporționale (ca un caz special - aceleași), atunci urmează șterge din matrice toate aceste rânduri, cu excepția unuia. Luați în considerare, de exemplu, matricea  ... În această matrice, ultimele trei rânduri sunt proporționale, deci este suficient să lăsați doar unul dintre ele:
... În această matrice, ultimele trei rânduri sunt proporționale, deci este suficient să lăsați doar unul dintre ele:  .
.
3) Dacă a apărut un rând zero în matrice în timpul transformărilor, atunci urmează și el șterge... Nu voi desena, desigur, linia zero este linia în care un zero.
4) Rândul matricei poate fi înmulți (împarte) cu orice număr, nenul... Luați în considerare, de exemplu, o matrice. Aici este recomandabil să împărțiți prima linie la –3, iar a doua linie să se înmulțească cu 2:  ... Această acțiune este foarte utilă, deoarece simplifică transformările ulterioare ale matricei.
... Această acțiune este foarte utilă, deoarece simplifică transformările ulterioare ale matricei.
5) Această transformare este cea mai dificilă, dar, de fapt, nici nu este nimic complicat. La rândul matricei, puteți adăugați un alt șir înmulțit cu un număr nenul. Luați în considerare matricea noastră dintr-un exemplu practic:. În primul rând, voi descrie conversia în detaliu. Înmulțiți prima linie cu –2:  , și la a doua linie adăugați prima linie înmulțită cu –2:
, și la a doua linie adăugați prima linie înmulțită cu –2:  ... Acum prima linie poate fi împărțită „înapoi” cu –2 :. După cum puteți vedea, linia pe care o adăugați LEE – nu s-a schimbat. Este mereu schimbă linia LA CARE SE ADĂUGĂ UT.
... Acum prima linie poate fi împărțită „înapoi” cu –2 :. După cum puteți vedea, linia pe care o adăugați LEE – nu s-a schimbat. Este mereu schimbă linia LA CARE SE ADĂUGĂ UT.
În practică, desigur, nu descriu în detaliu, dar scriu mai scurt: 
Încă o dată: la a doua linie a adăugat prima linie înmulțită cu –2... Șirul este de obicei multiplicat oral sau pe o schiță, în timp ce cursul mental al calculelor este cam așa:
„Rescriu matricea și rescriu prima linie:  »
»
„Prima coloană mai întâi. În partea de jos, trebuie să obțin zero. Prin urmare, înmulțesc unitatea din partea de sus cu –2 :, și adaug prima la a doua linie: 2 + (–2) = 0. Scriu rezultatul în a doua linie:  »
»
„Acum, pentru a doua coloană. Peste –1 înmulțit cu –2 :. Eu adaug primul la a doua linie: 1 + 2 = 3. Scriu rezultatul în a doua linie:  »
»
„Și a treia coloană. Peste –5 înmulțit cu –2 :. Eu adaug primul la a doua linie: –7 + 10 = 3. Scriu rezultatul în a doua linie: »
Vă rog, înțelegeți cu atenție acest exemplu și înțelegeți algoritmul de calcul secvențial, dacă înțelegeți acest lucru, atunci metoda Gauss este practic „în buzunar”. Dar, desigur, vom lucra la această transformare.
Transformările elementare nu schimbă soluția sistemului de ecuații
! ATENŢIE: manipulări considerate Nu pot folosi, dacă vi se oferă o sarcină în care matricile sunt date „de la sine”. De exemplu, cu „clasic” acțiuni cu matriciÎn niciun caz nu ar trebui să rearanjați ceva în interiorul matricilor!
Să ne întoarcem la sistemul nostru. Este practic dezmembrat.
Scriem matricea extinsă a sistemului și, folosind transformări elementare, o reducem la vedere în trepte:

(1) Prima linie înmulțită cu –2 a fost adăugată la a doua linie. Și din nou: de ce prima linie este înmulțită exact cu –2? Pentru a obține zero în partea de jos, ceea ce înseamnă că scăpați de o variabilă din a doua linie.
(2) Împarte al doilea rând la 3.
Scopul transformărilor elementare –
aduce matricea într-o formă în trepte:  ... În proiectarea sarcinii, „scara” este marcată cu un creion simplu, iar numerele care se află pe „trepte” sunt încercuite. Termenul „tip pas” în sine nu este în întregime teoretic, în literatura științifică și educațională este adesea numit vedere trapezoidală sau vedere triunghiulară.
... În proiectarea sarcinii, „scara” este marcată cu un creion simplu, iar numerele care se află pe „trepte” sunt încercuite. Termenul „tip pas” în sine nu este în întregime teoretic, în literatura științifică și educațională este adesea numit vedere trapezoidală sau vedere triunghiulară.
Ca rezultat al transformărilor elementare, am obținut echivalent sistemul original de ecuații:
Acum sistemul trebuie să fie „desfăcut” în direcția opusă - de jos în sus, se numește acest proces metoda Gauss înapoi.
În ecuația inferioară, avem un rezultat gata făcut :.
Luați în considerare prima ecuație a sistemului și înlocuiți-o cu valoarea deja cunoscută „joc”:
Să luăm în considerare cea mai comună situație când metoda Gauss necesită rezolvarea unui sistem de trei ecuații liniare cu trei necunoscute.
Exemplul 1
Rezolvați sistemul de ecuații prin metoda Gauss: 
Să notăm matricea extinsă a sistemului: 
Acum voi extrage imediat rezultatul la care vom ajunge în cursul soluției: 
Și din nou, scopul nostru este de a aduce matricea într-o formă în trepte folosind transformări elementare. De unde să începem acțiunea?
În primul rând, ne uităm la numărul din stânga sus: 
Aproape întotdeauna ar trebui să fie aici unitate... În general vorbind, –1 va fi bine (și uneori alte numere), dar cumva s-a întâmplat atât de tradițional încât unitatea să fie plasată de obicei acolo. Cum se organizează o unitate? Ne uităm la prima coloană - avem o unitate gata pregătită! Prima transformare: schimbați prima și a treia linie: 
Acum prima linie va rămâne neschimbată până la sfârșitul soluției.... Acum bine.
Unitatea din stânga sus este organizată. Acum trebuie să obțineți zerouri în aceste locuri: 
Obținem zerourile doar cu ajutorul transformării „dificile”. În primul rând, ne ocupăm de a doua linie (2, –1, 3, 13). Ce ar trebui făcut pentru a obține zero în prima poziție? Necesar la a doua linie adăugați prima linie înmulțită cu –2... Mental sau pe o schiță, înmulțiți prima linie cu –2: (–2, –4, 2, –18). Și realizăm în mod constant (din nou mental sau pe un proiect) adăugare, la a doua linie adăugați prima linie, deja înmulțită cu –2:
Scriem rezultatul pe a doua linie: 
Ne ocupăm de a treia linie în același mod (3, 2, –5, –1). Pentru a obține zero în prima poziție, aveți nevoie la a treia linie adăugați prima linie înmulțită cu –3... Mental sau pe o schiță, înmulțiți prima linie cu –3: (–3, –6, 3, –27). ȘI la a treia linie adăugați prima linie înmulțită cu –3:
Scriem rezultatul în a treia linie:
În practică, aceste acțiuni sunt de obicei efectuate oral și înregistrate într-un singur pas: 
Nu trebuie să numeri totul în același timp și în același timp... Ordinea calculelor și „scrierea” rezultatelor consistentși, de obicei, așa: mai întâi, rescriem prima linie și ne umflăm pe furiș - SECVENȚIAL și ATENT:
Și am examinat deja cursul mental al calculelor de mai sus.
În acest exemplu, acest lucru este ușor de făcut, împărțim a doua linie la –5 (deoarece toate numerele sunt divizibile cu 5 fără rest). În același timp, împărțim a treia linie la –2, deoarece cu cât numerele sunt mai mici, cu atât soluția este mai ușoară:
Pe stadiu final transformări elementare, aveți nevoie pentru a obține un alt zero aici: 
Pentru aceasta la a treia linie adăugați a doua linie înmulțită cu –2:
Încercați să analizați singuri această acțiune - înmulțiți mental a doua linie cu –2 și adăugați.
Ultima acțiune efectuată este coafura rezultatului, împărțiți a treia linie la 3.
Ca rezultat al transformărilor elementare, a fost obținut un sistem inițial echivalent de ecuații liniare: 
Misto.
Acum intră în joc inversul metodei Gauss. Ecuațiile „se desfac” de jos în sus.
În a treia ecuație, avem deja un rezultat gata făcut:
Ne uităm la a doua ecuație:. Înțelesul „z” este deja cunoscut, astfel:
Și, în sfârșit, prima ecuație:. „Ygrek” și „z” sunt cunoscute, problema este mică:
Răspuns: ![]()
După cum sa menționat deja de multe ori, pentru orice sistem de ecuații este posibil și necesar să se verifice soluția găsită, din fericire, este ușoară și rapidă.
Exemplul 2

Acesta este un eșantion de bricolaj, un eșantion de finalizare și răspunsul la sfârșitul tutorialului.
Trebuie remarcat faptul că curs de decizie s-ar putea să nu coincidă cu decizia mea, și aceasta este o caracteristică a metodei Gauss... Dar răspunsurile trebuie să fie aceleași!
Exemplul 3
Rezolvați un sistem de ecuații liniare prin metoda Gaussiană 
Să notăm matricea extinsă a sistemului și, folosind transformări elementare, să o aducem într-o formă pas cu pas:
Ne uităm la „pasul” din stânga sus. Ar trebui să avem o unitate acolo. Problema este că nu există deloc în prima coloană, așa că rearanjarea rândurilor nu va rezolva nimic. În astfel de cazuri, unitatea trebuie organizată folosind o transformare elementară. Acest lucru se poate face de obicei în mai multe moduri. Am facut asta:
(1) La prima linie adăugați a doua linie înmulțită cu -1... Adică, am înmulțit mental a doua linie cu –1 și am adăugat prima și a doua linie, în timp ce a doua linie nu s-a schimbat.

Acum, în partea stângă sus „minus one”, ceea ce ni se potrivește perfect. Oricine dorește să obțină +1 poate efectua o mișcare suplimentară a corpului: înmulțiți prima linie cu –1 (schimbați semnul).
(2) Prima linie înmulțită cu 5 a fost adăugată la a doua linie. Prima linie înmulțită cu 3 a fost adăugată la a treia linie.
(3) Prima linie a fost înmulțită cu -1, în principiu, aceasta este pentru frumusețe. De asemenea, am schimbat semnul celei de-a treia linii și l-am mutat pe locul doi, astfel, pe al doilea „pas, avem unitatea necesară.
(4) Al doilea rând, înmulțit cu 2, a fost adăugat la al treilea rând.
(5) A treia linie a fost împărțită la 3.
Un semn rău care indică o eroare în calcule (mai rar - o greșeală de scriere) este linia de jos „rea”. Adică, dacă în partea de jos avem ceva de genul și, în consecință, ![]() , apoi cu un grad ridicat de probabilitate se poate argumenta că s-a făcut o greșeală în cursul transformărilor elementare.
, apoi cu un grad ridicat de probabilitate se poate argumenta că s-a făcut o greșeală în cursul transformărilor elementare.
Încarcăm cursa inversă, în proiectarea exemplelor, sistemul în sine nu este adesea rescris, iar ecuațiile „sunt luate direct din matricea dată”. Mișcarea inversă, îți reamintesc, funcționează de jos în sus. Da, aici s-a dovedit cadoul:
Răspuns: ![]() .
.
Exemplul 4
Rezolvați un sistem de ecuații liniare prin metoda Gaussiană 
Acesta este un exemplu pentru o soluție independentă, este ceva mai complicat. Este în regulă dacă cineva se încurcă. Soluție completăși un model de proiectare la sfârșitul lecției. Soluția dvs. poate diferi de soluția mea.
În ultima parte, vom lua în considerare unele dintre caracteristicile algoritmului Gauss.
Prima caracteristică este că uneori unele variabile lipsesc în ecuațiile sistemului, de exemplu: 
Cum se scrie corect matricea de sistem extinsă? Am vorbit deja despre acest moment în lecție. Regula lui Cramer. Metoda matricei... În matricea extinsă a sistemului, punem zerouri în locul variabilelor lipsă: 
Apropo, acesta este un exemplu destul de ușor, deoarece există deja un zero în prima coloană și există mai puține transformări elementare care trebuie efectuate.
A doua caracteristică este următoarea. În toate exemplele luate în considerare, am plasat fie –1, fie +1 pe „pași”. Ar putea exista și alte numere? În unele cazuri, pot. Luați în considerare sistemul:  .
.
Aici, în "pasul" din stânga sus avem un doi. Dar observăm faptul că toate numerele din prima coloană sunt divizibile cu 2 fără rest - și celelalte două și șase. Iar deuce-ul din stânga sus ne va potrivi! La primul pas, trebuie să efectuați următoarele transformări: adăugați prima linie înmulțită cu –1 la a doua linie; la a treia linie adăugați prima linie înmulțită cu –3. Acest lucru ne va da zerourile dorite în prima coloană.
Sau un alt exemplu condiționat:  ... Aici ni se potrivesc și cele trei din al doilea „pas”, deoarece 12 (locul unde trebuie să obținem zero) este divizibil cu 3 fără rest. Este necesar să se efectueze următoarea transformare: la a treia linie se adaugă a doua linie înmulțită cu –4, ca urmare a căreia se va obține zero de care avem nevoie.
... Aici ni se potrivesc și cele trei din al doilea „pas”, deoarece 12 (locul unde trebuie să obținem zero) este divizibil cu 3 fără rest. Este necesar să se efectueze următoarea transformare: la a treia linie se adaugă a doua linie înmulțită cu –4, ca urmare a căreia se va obține zero de care avem nevoie.
Metoda Gauss este universală, dar există o particularitate. Puteți învăța cu încredere cum să rezolvați sistemele prin alte metode (metoda Cramer, metoda matricei) literalmente prima dată - există un algoritm foarte rigid. Dar pentru a vă simți încrezători în metoda Gauss, ar trebui să „umpleți mâna” și să rezolvați cel puțin 5-10 sisteme. Prin urmare, la început, este posibilă confuzie, erori în calcule și nu există nimic neobișnuit sau tragic în acest sens.
Vremea ploioasă de toamnă în afara ferestrei .... Prin urmare, pentru toată lumea, un exemplu mai complex pentru o soluție independentă:
Exemplul 5
Rezolvați sistemul a patru ecuații liniare cu patru necunoscute prin metoda Gauss. 
O astfel de sarcină în practică nu este atât de rară. Cred că chiar și un ceainic care a studiat cu atenție această pagină, algoritmul pentru rezolvarea unui astfel de sistem este intuitiv clar. Practic, totul este la fel - există doar mai multe acțiuni.
Cazurile în care sistemul nu are soluții (inconsistente) sau are infinit de multe soluții sunt luate în considerare în lecție Sisteme incompatibile și sisteme cu o soluție comună... Algoritmul considerat al metodei Gauss poate fi de asemenea fixat acolo.
Îți doresc succes!
Soluții și răspunsuri:
Exemplul 2: Soluţie: Să scriem matricea extinsă a sistemului și, folosind transformări elementare, să o aducem la o formă treptată.

Transformări elementare efectuate:
(1) Prima linie înmulțită cu –2 a fost adăugată la a doua linie. Prima linie înmulțită cu -1 a fost adăugată la a treia linie. Atenţie! Poate fi tentant să scădem prima din a treia linie, descurajez foarte mult scăderea - riscul unei erori este mult crescut. Doar adăugați!
(2) Semnul celei de-a doua linii a fost schimbat (înmulțit cu –1). A doua și a treia linie au fost schimbate. Notă că pe „trepte” suntem mulțumiți nu numai de unul, ci și de –1, ceea ce este și mai convenabil.
(3) Al doilea rând se adaugă la al treilea rând, înmulțit cu 5.
(4) Semnul celei de-a doua linii a fost modificat (înmulțit cu –1). A treia linie a fost împărțită cu 14.
Verso:
Răspuns: ![]() .
.
Exemplul 4: Soluţie: Să scriem matricea extinsă a sistemului și, folosind transformări elementare, să o aducem într-o formă pas cu pas:

Conversii efectuate:
(1) Al doilea a fost adăugat la prima linie. Astfel, unitatea dorită este organizată în „pasul” din stânga sus.
(2) Prima linie înmulțită cu 7 a fost adăugată la a doua linie. Prima linie înmulțită cu 6 a fost adăugată la a treia linie.
Al doilea pas se înrăutățește, „Candidații” pentru acesta sunt numerele 17 și 23 și avem nevoie fie de unul, fie de -1. Transformările (3) și (4) vor avea ca scop obținerea unității dorite
(3) A doua linie a fost adăugată la a treia linie, înmulțită cu –1.
(4) A treia linie a fost adăugată la a doua linie, înmulțită cu –3.
Se primește lucrul necesar la a doua treaptă
.
(5) A doua linie a fost adăugată la a treia linie, înmulțită cu 6.
În cadrul lecțiilor Metoda Gaussși Sisteme incompatibile / sisteme cu o soluție comună ne-am gândit sisteme neomogene de ecuații liniare, Unde membru liber(care este de obicei în dreapta) cel puțin unul dintre ecuații a fost diferită de zero.
Și acum, după o bună încălzire cu rangul matricei, vom continua să lustruim tehnica transformări elementare pe sistem omogen de ecuații liniare.
În primele paragrafe, materialul poate părea plictisitor și obișnuit, dar această impresie este înșelătoare. Pe lângă dezvoltarea în continuare a tehnicilor, vor exista o mulțime de informații noi, așa că vă rugăm să încercați să nu neglijați exemplele din acest articol.
Continuăm să ne ocupăm de sisteme de ecuații liniare. Până acum, am analizat sistemele care au o singură soluție. Astfel de sisteme pot fi rezolvate în orice mod: metoda substituției("Şcoală"), după formulele lui Cramer, metoda matricei, Metoda gaussiană... Cu toate acestea, în practică, încă două cazuri sunt răspândite atunci când:
1) sistemul este incompatibil (nu are soluții);
2) sistemul are infinit de multe soluții.
Pentru aceste sisteme, se folosește cea mai universală dintre toate metodele de soluție - Metoda Gauss... De fapt, metoda „școlii” va duce la răspuns, dar în matematica superioară este obișnuit să se utilizeze metoda gaussiană de eliminare succesivă a necunoscutelor. Pentru cei care nu sunt familiarizați cu algoritmul metodei Gaussian, vă rugăm să studiați mai întâi lecția Metoda Gauss
Transformările matriciale elementare în sine sunt exact aceleași, diferența va fi la sfârșitul soluției. Să luăm mai întâi în considerare câteva exemple când sistemul nu are soluții (inconsistente).
Exemplul 1
Ce vă atrage imediat atenția în acest sistem? Numărul de ecuații este mai mic decât numărul de variabile. Există o teoremă care afirmă: "Dacă numărul de ecuații din sistem este mai mic decât numărul de variabile, atunci sistemul este fie inconsistent, fie are infinit de multe soluții. "Și rămâne doar să aflăm.
Începutul soluției este complet obișnuit - notăm matricea extinsă a sistemului și, folosind transformări elementare, o aducem într-o formă pas cu pas:

(1). În pasul din stânga sus, trebuie să obținem (+1) sau (–1). Nu există astfel de numere în prima coloană, așa că rearanjarea rândurilor nu va face nimic. Unitatea va trebui organizată independent, iar acest lucru se poate face în mai multe moduri. Am făcut asta. La prima linie adăugați a treia linie înmulțită cu (–1).
(2). Acum primim două zerouri în prima coloană. La a doua linie adăugăm prima linie înmulțită cu 3. La a treia linie adăugăm prima linie înmulțită cu 5.
(3). După transformarea efectuată, este întotdeauna recomandabil să arătați și este posibil să simplificați liniile rezultate? Poate sa. Împărțiți al doilea rând la 2, obținând în același timp valoarea dorită (–1) la al doilea pas. Împărțiți al treilea rând cu (–3).
(4). Adăugați a doua linie la a treia linie. Probabil, toată lumea a acordat atenție liniei proaste care a rezultat ca urmare a transformărilor elementare:
![]() ... Este clar că acest lucru nu poate fi așa.
... Este clar că acest lucru nu poate fi așa.
Într-adevăr, rescriem matricea rezultată

înapoi la sistemul de ecuații liniare:

Dacă, ca urmare a transformărilor elementare, un șir al formei , Undeλ - un alt număr decât zero, atunci sistemul este incompatibil (nu are soluții).
Cum înregistrez sfârșitul unei misiuni? Trebuie să notați fraza:
„Ca urmare a transformărilor elementare, s-a obținut un șir de formă, unde λ ≠ 0 ". Răspuns: „Sistemul nu are soluții (inconsistente)”.
Vă rugăm să rețineți că, în acest caz, nu există o retrogradare a algoritmului Gaussian, nu există soluții și pur și simplu nu există nimic de găsit.
Exemplul 2
Rezolvați un sistem de ecuații liniare 
Acesta este un exemplu pentru o soluție de bricolaj. Soluție completă și răspuns la sfârșitul tutorialului.
Din nou, vă reamintim că cursul dvs. de decizie poate diferi de cursul nostru de decizie, metoda Gauss nu specifică un algoritm fără echivoc, trebuie să ghiciți în mod independent ordinea acțiunilor și acțiunile în sine.
O altă caracteristică tehnică a soluției: transformările elementare pot fi oprite imediat, imediat ce a apărut o linie a formularului, unde λ ≠ 0 ... Luați în considerare un exemplu condițional: să presupunem că după prima transformare se obține matricea
 .
.
Această matrice nu a fost încă redusă la o formă în trepte, dar nu este nevoie de alte transformări elementare, deoarece a apărut un rând al formei, unde λ ≠ 0 ... Ar trebui să răspundeți imediat că sistemul este incompatibil.
Când un sistem de ecuații liniare nu are soluții, acesta este aproape un cadou pentru elev, deoarece se obține o soluție scurtă, uneori literalmente în 2-3 pași. Dar totul în această lume este echilibrat, iar problema în care sistemul are infinit de multe soluții este mai lungă.
Exemplul 3:
Rezolvați un sistem de ecuații liniare

Există 4 ecuații și 4 necunoscute, deci sistemul poate avea fie o singură soluție, fie nu există soluții, sau poate avea infinit de multe soluții. Oricum ar fi, dar metoda Gauss ne va conduce oricum la răspuns. Aceasta este versatilitatea sa.
Începutul este din nou standard. Să notăm matricea extinsă a sistemului și, folosind transformări elementare, să o aducem într-o formă pas cu pas:

Atât și ți-a fost frică.
(1). Vă rugăm să rețineți că toate numerele din prima coloană sunt divizibile cu 2, deci suntem mulțumiți de cele două din pasul din stânga sus. La a doua linie adăugați prima linie înmulțită cu (–4). La a treia linie, adăugați prima linie înmulțită cu (–2). La a patra linie, adăugați prima linie înmulțită cu (–1).
Atenţie! Mulți pot fi tentați de la a patra linie scădea prima linie. Acest lucru se poate face, dar nu este necesar, experiența arată că probabilitatea unei erori în calcule crește de mai multe ori. Doar adăugați: la a patra linie adăugați prima linie înmulțită cu (–1) - exact!
(2). Ultimele trei linii sunt proporționale, două dintre ele pot fi șterse. Aici trebuie să arăți din nou atenție sporită, dar sunt liniile cu adevărat proporționale? Pentru a fi în siguranță, nu va fi inutil să înmulțim a doua linie cu (–1) și să împărțim a patra linie la 2, rezultând trei linii identice. Și abia apoi ștergeți două dintre ele. Ca urmare a transformărilor elementare, matricea extinsă a sistemului este redusă la o formă treptată:

Când completați o sarcină într-un caiet, este recomandabil să faceți aceleași note în creion pentru claritate.
Să rescriem sistemul de ecuații corespunzător: 
Singura soluție a sistemului de aici nu miroase a „obișnuit”. O linie proastă unde λ ≠ 0, de asemenea, nu. Aceasta înseamnă că acesta este al treilea caz rămas - sistemul are infinit de multe soluții.
Un număr infinit de soluții de sistem sunt scrise pe scurt sub forma așa-numitelor soluție generală de sistem.
Vom găsi soluția generală a sistemului folosind cursul invers al metodei Gauss. Pentru sistemele de ecuații cu un set infinit de soluții, apar noi concepte: „Variabile de bază”și „Variabile gratuite”... În primul rând, să definim ce variabile avem de bază, și ce variabile - liber... Nu este necesar să se explice în detaliu termenii algebrei liniare, este suficient să ne amintim că există astfel variabile de bazăși variabile libere.
Variabilele de bază „stau” întotdeauna strict pe treptele matricei... În acest exemplu, variabilele de bază sunt X 1 și X 3 .
Variabilele gratuite sunt totul rămas variabile care nu au primit un scară. În cazul nostru, există două dintre ele: X 2 și X 4 - variabile libere.
Acum ai nevoie toatevariabile de bază a exprima numai prinvariabile libere... Reversul algoritmului Gauss funcționează în mod tradițional de jos în sus. Din a doua ecuație a sistemului, exprimăm variabila de bază X 3:
Acum să ne uităm la prima ecuație: ![]() ... În primul rând, înlocuim expresia găsită în ea:
... În primul rând, înlocuim expresia găsită în ea:
![]()
Rămâne să exprimăm variabila de bază X 1 prin variabile gratuite X 2 și X 4:

În cele din urmă, am obținut ceea ce avem nevoie - toate variabile de bază ( X 1 și X 3) exprimat numai prin variabile libere ( X 2 și X 4):
![]()
De fapt, soluția generală este gata:
![]() .
.
Cum se scrie corect soluția generală? În primul rând, variabilele libere sunt scrise în soluția generală „de la sine” și strict în locurile lor. În acest caz, variabile libere X 2 și X 4 trebuie scris în pozițiile a doua și a patra:
 .
.
Expresiile obținute pentru variabilele de bază ![]() și, evident, trebuie să scrieți în prima și a treia poziție:
și, evident, trebuie să scrieți în prima și a treia poziție:

Din soluția generală a sistemului, puteți găsi infinit multe soluții private... E foarte simplu. Variabile libere X 2 și X 4 se numesc astfel pentru că pot fi date orice valori finale... Cele mai populare valori sunt zero, deoarece acesta este cel mai simplu mod de a obține soluția specială.
Înlocuind ( X 2 = 0; X 4 = 0) în soluția generală, obținem una dintre soluțiile particulare:
![]() , sau este o soluție specială care corespunde variabilelor libere la valori ( X 2 = 0; X 4 = 0).
, sau este o soluție specială care corespunde variabilelor libere la valori ( X 2 = 0; X 4 = 0).
Unitățile sunt un alt cuplu dulce, înlocuitor ( X 2 = 1 și X 4 = 1) într-o soluție generală:
![]() , adică (-1; 1; 1; 1) este o altă soluție specială.
, adică (-1; 1; 1; 1) este o altă soluție specială.
Este ușor de văzut că sistemul de ecuații are infinit de multe soluții,întrucât putem da variabile gratuite orice valori.
Fiecare soluția specială trebuie să satisfacă Pentru fiecare ecuația sistemului. Aceasta este baza pentru verificarea „rapidă” a corectitudinii soluției. Luați, de exemplu, o anumită soluție (-1; 1; 1; 1) și înlocuiți-o în partea stângă a fiecărei ecuații a sistemului original:
Totul ar trebui să se potrivească. Și cu orice decizie anume pe care o primiți - totul ar trebui să fie de asemenea de acord.
Strict vorbind, verificarea unei anumite soluții înșeală uneori, adică o anumită soluție poate satisface fiecare ecuație a sistemului, dar soluția generală în sine este de fapt găsită incorect. Prin urmare, în primul rând, verificarea soluției generale este mai amănunțită și mai fiabilă.
Cum să verificați soluția generală rezultată ![]() ?
?
Nu este dificil, dar necesită o mulțime de transformări care consumă mult timp. Trebuie să luați expresii de bază variabile, în acest caz ![]() și, și înlocuiți-le în partea stângă a fiecărei ecuații a sistemului.
și, și înlocuiți-le în partea stângă a fiecărei ecuații a sistemului.
În partea stângă a primei ecuații a sistemului:

Se obține partea dreaptă a primei ecuații inițiale a sistemului.
În partea stângă a celei de-a doua ecuații a sistemului:

Se obține partea dreaptă a celei de-a doua ecuații a sistemului.
Și mai departe - în partea stângă a ecuațiilor a treia și a patra a sistemului. Această verificare durează mai mult, dar garantează corectitudinea sută la sută a soluției generale. În plus, în anumite sarcini, tocmai verificarea soluției generale este necesară.
Exemplul 4:
Rezolvați sistemul folosind metoda Gaussiană. Găsiți o soluție generală și două soluții speciale. Verificați soluția generală.

Acesta este un exemplu pentru o soluție de bricolaj. Aici, apropo, din nou numărul de ecuații este mai mic decât numărul de necunoscute, ceea ce înseamnă că este imediat clar că sistemul va fi fie incompatibil, fie cu un set infinit de soluții.
Exemplul 5:
Rezolvați un sistem de ecuații liniare. Dacă sistemul are infinit de multe soluții, găsiți două soluții speciale și verificați soluția generală

Soluţie: Să notăm matricea extinsă a sistemului și, folosind transformări elementare, să o aducem într-o formă pas cu pas:

(1). Adăugați prima linie la a doua linie. La a treia linie adăugăm prima linie înmulțită cu 2. La a patra linie adăugăm prima linie înmulțită cu 3.
(2). La a treia linie, adăugați a doua linie înmulțită cu (–5). La a patra linie, adăugați a doua linie înmulțită cu (–7).
(3). A treia și a patra linie sunt aceleași, ștergem una dintre ele. Iată o astfel de frumusețe:

Variabilele de bază stau pe trepte, deci variabilele de bază.
Există o singură variabilă gratuită care nu a obținut un pas aici :.
(4). Mutare inversă. Să exprimăm variabilele de bază în termeni de variabilă liberă:
Din a treia ecuație:
![]()
Luați în considerare a doua ecuație și înlocuiți expresia găsită în ea:
![]() ,
, ![]() , ,
, ,
Luați în considerare prima ecuație și înlocuiți expresiile găsite și în ea:

Astfel, soluția generală pentru o variabilă gratuită este X 4:
![]()
Încă o dată, cum a apărut? Variabilă gratuită X 4 stă singur pe locul al patrulea de drept. Expresiile rezultate pentru variabilele de bază sunt, de asemenea, la locurile lor.
Să verificăm imediat soluția generală.
Înlocuim variabilele de bază, în partea stângă a fiecărei ecuații a sistemului:




Se obțin laturile corespunzătoare din dreapta ale ecuațiilor, astfel se găsește soluția generală corectă.
Acum, din soluția comună găsită ![]() obținem două soluții speciale. Toate variabilele sunt exprimate aici printr-o singură variabila libera x 4. Nu trebuie să-ți rupi capul.
obținem două soluții speciale. Toate variabilele sunt exprimate aici printr-o singură variabila libera x 4. Nu trebuie să-ți rupi capul.
Lasa X 4 = 0, apoi ![]() - prima soluție specială.
- prima soluție specială.
Lasa X 4 = 1, atunci ![]() - încă o soluție specială.
- încă o soluție specială.
Răspuns: Decizie comună: ![]() ... Soluții private:
... Soluții private:
![]() și .
și .
Exemplul 6:
Găsiți soluția generală a unui sistem de ecuații liniare.

Am verificat deja decizia generală, răspunsul poate fi de încredere. Cursul dvs. de decizie poate diferi de cursul nostru de decizie. Principalul lucru este ca deciziile comune să coincidă. Probabil, mulți oameni au observat un moment neplăcut în soluții: foarte des, în cursul invers al metodei Gauss, a trebuit să ne jucăm fracții comune... În practică, acest lucru este adevărat, cazurile în care nu există fracții sunt mult mai puțin frecvente. Fii pregătit mental și, cel mai important, din punct de vedere tehnic.
Să ne oprim asupra trăsăturilor soluției care nu au fost găsite în exemplele rezolvate. Soluția generală a sistemului poate include uneori o constantă (sau constante).
De exemplu, soluția generală este:. Aici una dintre variabilele de bază este egală cu un număr constant :. Nu există nimic exotic în asta, se întâmplă. Evident, în acest caz, orice soluție specială va conține un A în prima poziție.
Rareori, dar există sisteme în care numărul de ecuații este mai mare decât numărul de variabile... Cu toate acestea, metoda Gauss funcționează în cele mai dure condiții. Este necesar să reduceți calm matricea extinsă a sistemului la o formă în trepte conform algoritmului standard. Un astfel de sistem poate fi inconsistent, poate avea infinit de multe soluții și, în mod ciudat, poate avea o singură soluție.
Să repetăm în sfaturile noastre - pentru a vă simți confortabil atunci când rezolvați un sistem folosind metoda Gaussian, ar trebui să vă umpleți mâna și să rezolvați cel puțin o duzină de sisteme.
Soluții și răspunsuri:
Exemplul 2:
Soluţie:Să notăm matricea extinsă a sistemului și, folosind transformări elementare, să o aducem într-o formă pas cu pas.
Transformări elementare efectuate:
(1) Prima și a treia linie sunt inversate.
(2) Prima linie înmulțită cu (–6) a fost adăugată la a doua linie. Prima linie înmulțită cu (–7) a fost adăugată la a treia linie.
(3) A doua linie înmulțită cu (–1) a fost adăugată la a treia linie.
Ca urmare a transformărilor elementare, un șir al formei, Unde λ ≠ 0 .Aceasta înseamnă că sistemul este incompatibil.Răspuns: fără soluții.
Exemplul 4:
Soluţie:Să notăm matricea extinsă a sistemului și, folosind transformări elementare, să o aducem într-o formă pas cu pas:

Conversii efectuate:
(1). Prima linie înmulțită cu 2 a fost adăugată la a doua linie. Prima linie înmulțită cu 3 a fost adăugată la a treia linie.
Nu este nimeni pentru al doilea pas , iar transformarea (2) vizează obținerea acesteia.
(2). A treia linie a fost adăugată la a doua linie înmulțită cu –3.
(3). A doua și a treia linie au fost schimbate (rearanjate rezultatul -1 la al doilea pas)
(4). A treia linie a fost adăugată la a doua linie înmulțită cu 3.
(5). Semnul primelor două linii a fost schimbat (înmulțit cu –1), a treia linie a fost împărțită la 14.
Verso:
(1). Aici - variabile de bază (care sunt pe trepte) și - variabile libere (care nu au obținut un pas).
(2). Să exprimăm variabilele de bază în termeni de variabile libere:
Din a treia ecuație: .
(3). Luați în considerare a doua ecuație:, soluții speciale:
Răspuns: Decizie comună: ![]()
Numere complexe
În această secțiune, vom face cunoștință cu conceptul număr complex, considera algebric, trigonometricși formă exemplară număr complex. De asemenea, vom învăța cum să efectuăm acțiuni cu numere complexe: adunare, scădere, multiplicare, divizare, exponențiere și extracție de rădăcină.
Pentru a stăpâni numerele complexe, nu aveți nevoie de cunoștințe speciale din cursul matematicii superioare, iar materialul este disponibil chiar și pentru un student. Este suficient să puteți efectua operații algebrice cu numere „obișnuite” și să vă amintiți trigonometria.
În primul rând, să ne amintim numerele „obișnuite”. În matematică, ele sunt numite set de numere realeși notat cu litera R, sau R (îngroșat). Toate numerele reale stau pe linia numerică familiară:

Compania numerelor reale este foarte pestrițată - aici există numere întregi, fracții și numere iraționale. În acest caz, fiecare punct al axei numerice corespunde în mod necesar unui anumit număr real.
Cu toate acestea, în practică, încă două cazuri sunt răspândite:
- Sistemul este incompatibil (nu are soluții);
- Sistemul este compatibil și are infinit de multe soluții.
Notă : Termenul "interoperabilitate" implică faptul că sistemul are cel puțin o soluție. Într-o serie de sarcini, este necesar să investigați mai întâi sistemul pentru compatibilitate, cum să faceți acest lucru - consultați articolul despre rangul matricilor.
Pentru aceste sisteme, se folosește cea mai universală dintre toate metodele de soluție - Metoda Gauss... De fapt, metoda „școlii” va duce la răspuns, dar în matematica superioară este obișnuit să se utilizeze metoda gaussiană de eliminare succesivă a necunoscutelor. Pentru cei care nu sunt familiarizați cu algoritmul metodei Gaussian, vă rugăm să studiați mai întâi lecția Metoda gaussiană pentru manechine.
Transformările matriciale elementare în sine sunt exact aceleași, diferența va fi la sfârșitul soluției. Să luăm mai întâi în considerare câteva exemple când sistemul nu are soluții (inconsistente).
Exemplul 1
Ce vă atrage imediat atenția în acest sistem? Numărul de ecuații este mai mic decât numărul de variabile. Dacă numărul de ecuații este mai mic decât numărul de variabile, atunci putem spune imediat că sistemul este fie incompatibil, fie are infinit de multe soluții. Și rămâne doar să aflăm.
Începutul soluției este complet obișnuit - notăm matricea extinsă a sistemului și, folosind transformări elementare, o aducem într-o formă pas cu pas:
![]()
(1) În treapta din stânga sus, trebuie să obținem +1 sau –1. Nu există astfel de numere în prima coloană, așa că rearanjarea rândurilor nu va face nimic. Unitatea va trebui organizată independent, iar acest lucru se poate face în mai multe moduri. Am făcut acest lucru: La prima linie adăugăm a treia linie înmulțită cu -1.
(2) Acum primim două zerouri în prima coloană. La a doua linie adăugăm prima linie înmulțită cu 3. La a treia linie adăugăm prima linie înmulțită cu 5.
(3) După transformarea efectuată, este întotdeauna recomandabil să arătați și este posibil să simplificați liniile rezultate? Poate sa. Împărțiți al doilea rând la 2, obținând în același timp valoarea dorită –1 la al doilea pas. Împărțiți al treilea rând cu –3.
(4) Adăugați a doua linie la a treia linie.
Probabil, toată lumea a acordat atenție liniei proaste care a rezultat ca urmare a transformărilor elementare: ![]() ... Este clar că acest lucru nu poate fi așa. Într-adevăr, rescriem matricea rezultată
... Este clar că acest lucru nu poate fi așa. Într-adevăr, rescriem matricea rezultată ![]() înapoi la sistemul de ecuații liniare:
înapoi la sistemul de ecuații liniare: ![]()
Dacă, ca urmare a transformărilor elementare, se obține un șir de formă, unde este un număr diferit de zero, atunci sistemul este incompatibil (nu are soluții).
Cum înregistrez sfârșitul unei misiuni? Să desenăm cu cretă albă: „ca urmare a transformărilor elementare, s-a obținut o linie a formei, unde” și să dăm răspunsul: sistemul nu are soluții (inconsecvent).
Dacă, în funcție de condiție, este necesară CERCETAREA sistemului pentru compatibilitate, atunci este necesar să se emită o soluție într-un stil mai solid cu implicarea conceptului rangul matricei și teorema Kronecker-Capelli.
Vă rugăm să rețineți că aici nu există o retrogradare Gauss - nu există soluții și pur și simplu nu există nimic de găsit.
Exemplul 2
Rezolvați un sistem de ecuații liniare
Acesta este un exemplu pentru o soluție de bricolaj. Soluție completă și răspuns la sfârșitul tutorialului. Din nou, vă reamintesc că cursul dvs. de decizie poate diferi de cursul meu de decizie, algoritmul Gauss nu are o „rigiditate” puternică.
O altă caracteristică tehnică a soluției: transformările elementare pot fi oprite imediat, imediat ce a apărut o linie a formularului, unde. Luați în considerare un exemplu condițional: să presupunem că după prima transformare se obține matricea ![]() ... Matricea nu a fost încă redusă la o formă în trepte, dar nu este nevoie de alte transformări elementare, deoarece a apărut o linie a formei, unde. Ar trebui să răspundeți imediat că sistemul este incompatibil.
... Matricea nu a fost încă redusă la o formă în trepte, dar nu este nevoie de alte transformări elementare, deoarece a apărut o linie a formei, unde. Ar trebui să răspundeți imediat că sistemul este incompatibil.
Când un sistem de ecuații liniare nu are soluții, acesta este aproape un dar, deoarece se obține o soluție scurtă, uneori literalmente în 2-3 pași.
Dar totul în această lume este echilibrat, iar problema în care sistemul are infinit de multe soluții este mai lungă.
Exemplul 3
Rezolvați un sistem de ecuații liniare ![]()
Există 4 ecuații și 4 necunoscute, astfel încât sistemul poate avea fie o singură soluție, fie nu poate avea soluții, fie poate avea infinit de multe soluții. Oricum ar fi, dar metoda Gauss ne va conduce oricum la răspuns. Aceasta este versatilitatea sa.
Începutul este din nou standard. Să notăm matricea extinsă a sistemului și, folosind transformări elementare, să o aducem într-o formă pas cu pas: ![]()
Atât și ți-a fost frică.
(1) Rețineți că toate numerele din prima coloană sunt divizibile cu 2, deci suntem mulțumiți de două în pasul din stânga sus. La a doua linie, adăugați prima linie înmulțită cu –4. La a treia linie, adăugați prima linie înmulțită cu –2. La a patra linie, adăugați prima linie înmulțită cu –1.
Atenţie! Mulți pot fi tentați de la a patra linie scădea prima linie. Acest lucru se poate face, dar nu este necesar, experiența arată că probabilitatea unei erori în calcule crește de mai multe ori. Doar adăugați: la a patra linie, adăugați prima linie înmulțită cu -1 - exact!
(2) Ultimele trei rânduri sunt proporționale, două dintre ele pot fi șterse.
Aici trebuie să arăți din nou atenție sporită, dar sunt liniile cu adevărat proporționale? Pentru a fi în siguranță (în special pentru un ceainic) nu va fi inutil să înmulțim a doua linie cu –1 și să împărțim a patra linie la 2, rezultând trei linii identice. Și abia apoi ștergeți două dintre ele.
Ca urmare a transformărilor elementare, matricea extinsă a sistemului este redusă la o formă în trepte: ![]()
Când completați o sarcină într-un caiet, este recomandabil să faceți aceleași note în creion pentru claritate.
Să rescriem sistemul de ecuații corespunzător: ![]()
Singura soluție a sistemului de aici nu miroase a „obișnuit”. Nu există nici o linie proastă. Aceasta înseamnă că acesta este al treilea caz rămas - sistemul are infinit de multe soluții. Uneori, în funcție de condiție, este necesar să se investigheze compatibilitatea sistemului (adică pentru a dovedi că soluția există deloc), puteți citi despre aceasta în ultimul paragraf al articolului Cum găsesc rangul unei matrice? Dar, deocamdată, analizăm elementele de bază:
Un număr infinit de soluții de sistem sunt scrise pe scurt sub forma așa-numitelor soluție generală de sistem .
Găsim soluția generală a sistemului folosind mișcarea inversă a metodei Gauss.
Mai întâi trebuie să determinăm ce variabile avem de bazăși care variabile liber... Nu este necesar să vă deranjați cu termenii algebrei liniare, este suficient să ne amintim că există astfel de variabile de bazăși variabile libere.
Variabilele de bază „stau” întotdeauna strict pe treptele matricei.
În acest exemplu, variabilele de bază sunt și
Variabilele gratuite sunt totul rămas variabile care nu au primit un scară. În cazul nostru, există două dintre ele: - variabile libere.
Acum ai nevoie toate variabile de bază a exprima numai prin variabile libere.
Reversul algoritmului Gauss funcționează în mod tradițional de jos în sus.
Din a doua ecuație a sistemului, exprimăm variabila de bază:
Acum să ne uităm la prima ecuație: ![]() ... În primul rând, înlocuim expresia găsită în ea:
... În primul rând, înlocuim expresia găsită în ea: ![]()
Rămâne să exprimăm variabila de bază în termeni de variabile libere: ![]()
În cele din urmă, am obținut ceea ce avem nevoie - toate variabilele de bază sunt exprimate numai prin variabile libere: ![]()
De fapt, soluția generală este gata: ![]()
Cum se scrie corect soluția generală?
Variabilele libere sunt scrise în soluția generală „singure” și strict în locurile lor. În acest caz, variabilele libere trebuie scrise în pozițiile a doua și a patra: ![]() .
.
Expresiile obținute pentru variabilele de bază ![]() și, evident, trebuie să scrieți în prima și a treia poziție:
și, evident, trebuie să scrieți în prima și a treia poziție: ![]()
Oferind variabile gratuite valori arbitrare, puteți găsi infinit multe soluții private... Cele mai populare valori sunt zerouri, deoarece soluția specială este cea mai ușoară. Să înlocuim soluția generală: ![]()
- o soluție privată.
Unitățile sunt un alt cuplu dulce, să le înlocuim în soluția generală: ![]()
- încă o soluție specială.
Este ușor de văzut că sistemul de ecuații are infinit de multe soluții(deoarece putem da variabile gratuite orice valori)
Fiecare soluția specială trebuie să satisfacă Pentru fiecare ecuația sistemului. Aceasta este baza pentru verificarea „rapidă” a corectitudinii soluției. Luați, de exemplu, o anumită soluție și conectați-o în partea stângă a fiecărei ecuații din sistemul original: ![]()
Totul ar trebui să se potrivească. Și cu orice decizie anume pe care o primiți - totul ar trebui să fie de asemenea de acord.
Dar, strict vorbind, verificarea unei anumite soluții uneori înșeală, adică o anumită soluție poate satisface fiecare ecuație a sistemului, dar soluția generală în sine este de fapt găsită incorect.
Prin urmare, verificarea soluției generale este mai amănunțită și mai fiabilă. Cum să verificați soluția generală rezultată ![]() ?
?
Este ușor, dar destul de trist. Trebuie să luați expresii de bază variabile, în acest caz ![]() și, și înlocuiți-le în partea stângă a fiecărei ecuații a sistemului.
și, și înlocuiți-le în partea stângă a fiecărei ecuații a sistemului.
În partea stângă a primei ecuații a sistemului: ![]()
În partea stângă a celei de-a doua ecuații a sistemului: ![]()
Se obține partea dreaptă a ecuației inițiale.
Exemplul 4
Rezolvați sistemul prin metoda Gaussiană. Găsiți o soluție generală și două soluții speciale. Verificați soluția generală. ![]()
Acesta este un exemplu pentru o soluție de bricolaj. Aici, apropo, din nou numărul de ecuații este mai mic decât numărul de necunoscute, ceea ce înseamnă că este imediat clar că sistemul va fi fie incompatibil, fie cu un set infinit de soluții. Ce este important în procesul decizional în sine? Atenție, din nou atenție... Soluție completă și răspuns la sfârșitul tutorialului.
Și încă câteva exemple pentru consolidarea materialului
Exemplul 5
Rezolvați un sistem de ecuații liniare. Dacă sistemul are infinit de multe soluții, găsiți două soluții speciale și verificați soluția generală ![]()
Soluţie: Să scriem matricea extinsă a sistemului și, folosind transformări elementare, să o aducem într-o formă pas cu pas: ![]()
(1) Adăugați prima linie la a doua linie. La a treia linie adăugăm prima linie înmulțită cu 2. La a patra linie adăugăm prima linie înmulțită cu 3.
(2) Adăugați al doilea rând înmulțit cu –5 la a treia linie. La a patra linie, adăugați a doua linie înmulțită cu –7.
(3) A treia și a patra linie sunt aceleași, ștergem una dintre ele.
Iată o astfel de frumusețe: ![]()
Variabilele de bază stau pe trepte, deci variabilele de bază.
Există o singură variabilă gratuită care nu a obținut un pas aici:
Verso:
Să exprimăm variabilele de bază în termeni de variabilă liberă:
Din a treia ecuație: ![]()
Luați în considerare a doua ecuație și înlocuiți expresia găsită în ea: ![]()
![]()
Luați în considerare prima ecuație și înlocuiți expresiile găsite și în ea: ![]()
Da, un calculator care numără fracțiile obișnuite este încă la îndemână.
Deci soluția generală este: ![]()
Încă o dată, cum a apărut? Variabila gratuită stă singură pe locul ei de drept. Expresiile rezultate pentru variabilele de bază și-au luat și ele locul ordinal.
Să verificăm imediat soluția generală. Lucrați pentru negri, dar am făcut-o deja, așa că prindeți =)
Înlocuim trei eroi, în partea stângă a fiecărei ecuații a sistemului:
![]()
![]()
![]()
![]()
Se obțin laturile corespunzătoare din dreapta ale ecuațiilor, astfel, soluția generală este găsită corect.
Acum, din soluția comună găsită ![]() obținem două soluții speciale. Singura variabilă gratuită este bucătarul de aici. Nu trebuie să-ți rupi capul.
obținem două soluții speciale. Singura variabilă gratuită este bucătarul de aici. Nu trebuie să-ți rupi capul.
Lasă, atunci ![]() - o soluție privată.
- o soluție privată.
Lasă, atunci ![]() - încă o soluție specială.
- încă o soluție specială.
Răspuns: Decizie comună: ![]() , soluții speciale:
, soluții speciale: ![]() , .
, .
Nu ar fi trebuit să-mi amintesc despre negrii de aici ... ... pentru că mi-au intrat în cap tot felul de motive sadice și mi-am amintit de binecunoscutul foto-broască, în care Klanii în haine albe aleargă pe câmp după o jucător de fotbal negru. Stau, zâmbind liniștit. Știi cât de distractiv….
O mulțime de matematică este dăunătoare, deci un exemplu final similar pentru propria soluție.
Exemplul 6
Găsiți soluția generală a unui sistem de ecuații liniare. ![]()
Am verificat deja soluția generală, răspunsul poate fi de încredere. Cursul dvs. de decizie poate diferi de cursul meu de decizie, principalul lucru este că deciziile generale coincid.
Probabil, mulți oameni au observat un moment neplăcut în soluții: foarte des în cursul invers al metodei Gauss, a trebuit să ne lăudăm cu fracții obișnuite. În practică, acest lucru este adevărat, cazurile în care nu există fracții sunt mult mai puțin frecvente. Fii pregătit mental și, cel mai important, din punct de vedere tehnic.
Mă voi gândi la unele dintre caracteristicile soluției care nu au fost găsite în exemplele rezolvate.
Soluția generală a sistemului poate include uneori o constantă (sau constante), de exemplu:. Aici una dintre variabilele de bază este egală cu un număr constant :. Nu există nimic exotic în asta, se întâmplă. Evident, în acest caz, orice soluție specială va conține un A în prima poziție.
Rareori, dar există sisteme în care numărul de ecuații este mai mare decât numărul de variabile... Metoda Gauss funcționează în cele mai severe condiții, ar trebui să aduceți calm matricea extinsă a sistemului într-o formă în trepte conform algoritmului standard. Un astfel de sistem poate fi inconsistent, poate avea infinit de multe soluții și, în mod ciudat, poate avea o singură soluție.